
前言¶
本文档主要介绍BS2X设备驱动开发的相关内容,主要包括工作原理、按场景描述接口使用方法和注意事项。
本文档以BS21为例进行说明示例,后续不再单独说明,请用户知悉。
所有的驱动接口都有返回值,用户使用时,建议每个接口都进行下返回值校验,根据返回值,判断是否执行成功。返回值错误码详见“include/errcode.h”。
本文档主要适用于以下工程师:
技术支持工程师
软件开发工程师
在本文中可能出现下列标志,它们所代表的含义如下。





|
||
新增“USB_DFU”章节内容。 |
||
Pinctrl¶
概述¶
提供Pinctrl控制器用于控制IO管脚的复用功能,可配置规格如下:
支持配置32个IO管脚。
支持配置IO驱动能力、IO功能复用以及设置IO上下拉状态等功能。
功能描述¶
Pinctrl驱动模块提供的接口及功能如下:
uapi_pin_init(void):初始化Pinctrl。
uapi_pin_deinit(void):去初始化Pinctrl。
uapi_pin_set_mode(pin_t pin, pin_mode_t mode):设置指定IO复用模式(pin表示当前IO管脚,mode表示当前引脚需要配置的复用模式)。
uapi_pin_get_mode(pin_t pin):获取指定IO的复用模式(pin表示当前IO管脚)。
uapi_pin_set_ds(pin_t pin, pin_drive_strength_t ds):设置指定IO驱动能力(pin表示当前IO管脚,ds表示当前引脚需要配置的驱动能力)。
uapi_pin_get_ds(pin_t pin):获取指定IO驱动能力(pin表示当前IO管脚)。
uapi_pin_set_pull(pin_t pin, pin_pull_t pull_type):设置指定IO的上拉/下拉状态(pin表示当前IO管脚,pull_type表示当前引脚需要配置的上下拉状态)。
uapi_pin_get_pull(pin_t pin):获取指定IO的上拉/下拉状态(pin表示当前IO管脚)。
uapi_pin_set_ie(pin_t pin,pin_input_enable_t ie):设置指定IO的IE使能/去使能(pin表示当前IO管脚,ie表示当前引脚需要配置的输入中断使能状态)。(打开CONFIG_PINCTRL_SUPPORT_IE宏才能使用)
uapi_pin_get_ie(pin_t pin):获取指定IO的IE使能/去使能(pin表示当前IO管脚)。(打开CONFIG_PINCTRL_SUPPORT_IE宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 PINCTRL相关宏描述
该宏代表Pinctrl的输入中断使能,若某个管脚配成输入模式或者有输入功能,要想使其输入值或者输入中断生效,则该宏必须打开,否则视情况选择 |
|||||
开发指引¶
Pinctrl接口使用遵循如下操作步骤(以下步骤根据实际需要可选):
调用uapi_pin_init接口,初始化PINCTRL模块。
调用uapi_pin_set_ie、uapi_pin_get_ie接口,设置/查看指定IO的IE输入中断使能/去使能。
调用uapi_pin_set_mode、uapi_pin_get_mode接口,设置/查看指定IO的复用模式。
调用uapi_pin_set_ds、uapi_pin_get_ds接口,设置/查看指定IO的驱动能力。
调用uapi_pin_set_pull、uapi_pin_get_pull接口,设置/查看指定IO的上拉/下拉状态。
调用uapi_pin_deinit接口,去初始化PINCTRL模块。
示例:
/* 初始化PINCTRL模块 */
uapi_pin_init();
/* 设置S_MGPIO19的IE使能 */
uapi_pin_set_ie(S_MGPIO19, PIN_IE_1);
/* 设置S_MGPIO19的复用功能为gpio */
uapi_pin_set_mode(S_MGPIO19, HAL_PIO_FUNC_GPIO);
/* 获取S_MGPIO19的复用功能为gpio */
pin_mode_t mode = uapi_pin_get_mode(S_MGPIO19);
/* 设置S_MGPIO19的驱动能力为PIN_DS_2 */
uapi_pin_set_ds(S_MGPIO19, PIN_DS_2);
/* 获取S_MGPIO19的驱动能力为PIN_DS_2 */
pin_drive_strength_t ds = uapi_pin_get_ds(S_MGPIO19);
/* 设置S_MGPIO19为上拉模式 */
uapi_pin_set_pull(S_MGPIO19, PIN_PULL_UP);
/* 获取S_MGPIO19为上拉模式 */
pin_pull_t pull = uapi_pin_get_pull(S_MGPIO19);
/* 去初始化PINCTRL模块 */
uapi_pin_deinit();
注意事项¶
配置IO复用功能时,应关注此IO是否支持目标功能或者已经被复用为其他功能,避免影响既有功能, IO复用请参考“sdk\drivers\chips\bs2x\porting\pinctrl\pinctrl_porting.h”源码中“pin_mode_t”结构体的定义。
SDK默认配置的管脚IE全部为使能,一般来说,对于管脚上会发生中断或者承担数据的传输的管脚,要使能IE,避免影响IP功能;除此之外的管脚,可以去使能IE,避免不必要的IO漏电,影响功耗。
本产品已经将需要IE使能的管脚在对应的驱动内配置完毕。
配置流程 :通过函数uapi_pin_set_ie(pin, PIN_IE_0/PIN_IE_1)去使能/使能IE,并确保CONFIG_PINCTRL_SUPPORT_IE宏打开。
驱动能力PIN_DS_0为最弱,PIN_DS_3为最强。
说明: 如果IE不使能但是注册了gpio低电平中断,CPU会一直收到中断。 IE是控制输入中断使能的功能,如果GPIO配置输出为高电平,建议Pinctrl配置上拉,否则会漏电。
GPIO¶
概述¶
GPIO(General-purpose input/output)是通用输入输出的缩写,是一种通用的I/O接口标准。可以配置为输入或输出模式,以便控制外部设备或与其他设备通信。可用于连接各种设备,如LED灯、传感器、执行器等。
GPIO规格如下:
支持设置/获取GPIO管脚方向、设置/获取输出电平状态。
支持外部电平中断以及外部边沿中断上报。
支持每个GPIO独立中断。
功能描述¶
GPIO模块提供的接口及功能如下:
uapi_gpio_init(void):初始化GPIO。
uapi_gpio_deinit(void):去初始化GPIO。
uapi_gpio_set_dir(pin_t pin, gpio_direction_t dir):设置指定GPIO方向(输入/输出)(pin表示当前IO管脚,dir表示当前引脚需要配置的输入输出方向)。
uapi_gpio_get_dir(pin_t pin):获取指定GPIO方向(输入/输出)(pin表示当前IO管脚)。
uapi_gpio_set_val(pin_t pin, gpio_level_t level):设置指定GPIO输出电平状态(pin表示当前IO管脚,level表示当前引脚需要配置的电平状态)。
uapi_gpio_get_val(pin_t pin):获取指定GPIO的输入电平状态(pin表示当前IO管脚)。
uapi_gpio_get_output_val(pin_t pin):获取指定GPIO的输出电平状态(pin表示当前IO管脚)。
uapi_gpio_toggle(pin_t pin):GPIO输出电平状态翻转(pin表示当前IO管脚)。
uapi_gpio_register_isr_func(pin_t pin, uint32_t trigger, gpio_callback_t callback):注册指定GPIO中断(pin表示当前IO管脚,trigger表示当前引脚需要配置的中断类型,callback表示当前引脚配置的回调函数)。
uapi_gpio_unregister_isr_func(pin_t pin):去注册指定GPIO中断(pin表示当前IO管脚)。
uapi_gpio_enable_interrupt(pin_t pin):使能GPIO中断(pin表示当前IO管脚)。
uapi_gpio_disable_interrupt(pin_t pin): 关闭GPIO中断(pin表示当前IO管脚)。
uapi_gpio_clear_interrupt(pin_t pin):清除GPIO中断(pin表示当前IO管脚)。
KCONFIG配置¶
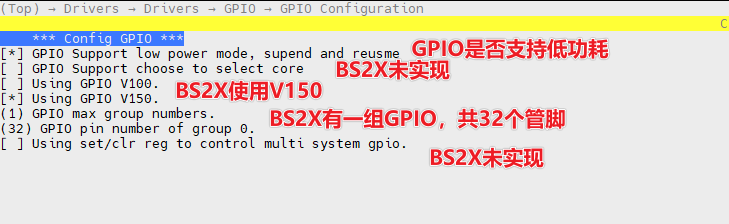
配置宏具体描述如表1所示。
表 1 GPIO相关宏描述
开发指引¶
GPIO接口使用遵循如下操作步骤:
调用uapi_pin_init,uapi_gpio_init接口,初始化PINCTRL模块以及GPIO模块。
调用uapi_pin_set_mode接口,将PIN复用为GPIO功能。
根据用户开发需求,可设置GPIO接口为输出、输入和中断模式,设置方法如下:
输出模式:
调用uapi_gpio_set_dir接口,设置GPIO方向为OUT,可通过调用uapi_gpio_get_dir接口,确定该GPIO方向是否设置合适。
调用uapi_gpio_set_val接口,设置GPIO输出电平状态(高/低)。
输入模式:
调用uapi_gpio_set_dir接口,设置GPIO方向为IN,可通过调用uapi_gpio_get_dir接口,确定该GPIO方向是否设置合适。
调用uapi_pin_set_pull接口,配置pull up\pull done\pull none。
调用uapi_gpio_get_val接口,获取GPIO输入电平状态。
中断模式:
调用uapi_gpio_set_dir接口,设置GPIO方向为IN,可通过调用uapi_gpio_get_dir接口,确定该GPIO方向是否设置合适。
调用uapi_gpio_register_isr_func接口,注册GPIO中断回调函数。
调用uapi_gpio_enable_interrupt接口,使能GPIO中断。
调用uapi_gpio_unregister_isr_func接口,注销GPIO中断回调函数(去注册中断时调用)。
调用uapi_gpio_disable_interrupt接口,去使能GPIO中断。
调用uapi_gpio_clear_interrupt接口:清除GPIO中断。
调用uapi_gpio_deinit接口,去初始化GPIO模块。
此处以输入模式为例:
#include "gpio.h"
void gpio_callback_func(pin_t pin, uintptr_t param)
{
unused(param);
uapi_gpio_disable_interrupt(pin);
osal_printk("PIN:%d interrupt success. \r\n", pin);
}
errcode_t sample_gpio_test(pin_t pin)
{
uapi_pin_init();
uapi_gpio_init();
uapi_pin_set_mode(pin, HAL_PIO_FUNC_GPIO); /* 设置指定IO复用为GPIO模式 */
uapi_gpio_set_dir(pin, GPIO_DIRECTION_INPUT); /* 设置指定GPIO为输入模式 */
/* 注册指定GPIO上升沿中断,回调函数为gpio_callback_func */
if (uapi_gpio_register_isr_func(pin, GPIO_INTERRUPT_RISING_EDGE, gpio_callback_func) != ERRCODE_SUCC) {
uapi_gpio_unregister_isr_func(pin); /* 清理残留 */
return ERRCODE_FAIL;
}
uapi_gpio_enable_interrupt(pin);
return ERRCODE_SUCC;
}
注意事项¶
在使用GPIO电平中断时,需要在回调函数中清除中断并暂时去使能中短触发,否则会导致系统一直处于中断处理中,无法执行其他功能。
触发方式(trigger)在没有明确需求场景时,推荐使用默认配置。
UART¶
概述¶
UART(Universal Asynchronous Receiver/Transmitter)是通用异步收发器的缩写,是一种串行、异步、全双工的通信协议,用于设备间的数据传输。UART是最常用的设备间通信协议之一,正确配置后,UART可以配合许多不同类型的涉及发送和接收串行数据的串行协议工作 。
芯片MCU侧提供了3个可配置的UART外设单元:UART0(UART_L0)、UART1(UART_H0)、UART2(UART_L1)。
UART规格如下:
支持可编程数据位、可编程停止位、可编程校验位。
UART支持流控工作模式,并支持配置RTS水线。
提供64×8的TX FIFO以及RX FIFO。
支持接收FIFO中断、发送FIFO中断、接收超时中断、错误中断等中断屏蔽与响应。
支持DMA数据搬移方式。
功能描述¶
驱动代码在include\driver\uart.h声明了UART驱动相关函数,提供的接口及功能如下:
uapi_uart_init(uart_bus_t bus, const uart_pin_config_t *pins, const uart_attr_t *attr, const uart_extra_attr_t *extra_attr, uart_buffer_config_t *uart_buffer_config):初始化UART模块(bus表示当前UART bus串口号,pins表示UART中使用的PIN,包括TX, RX, RTS和CTS,attr表示UART的基础配置参数,extra_attr表示UART的高级配置参数,uart_buffer_config表示指定UART的接收Buffer)。
uapi_uart_deinit(uart_bus_t bus):去初始化UART(bus表示当前UART bus串口号)。
uapi_uart_set_attr(uart_bus_t bus, const uart_attr_t *attr):设置UART配置参数(bus表示当前UART bus串口号,attr表示UART的基础配置参数)。
uapi_uart_get_attr(uart_bus_t bus, const uart_attr_t *attr):获取UART配置参数(bus表示当前UART bus串口号,attr表示UART的基础配置参数)。
uapi_uart_has_pending_transmissions(uart_bus_t bus):查询UART是否正在传输数据(bus表示当前UART bus串口号)。
uapi_uart_rx_fifo_is_empty(uart_bus_t bus):判断RX FIFO是否为空(bus表示当前UART bus串口号)。
uapi_uart_tx_fifo_is_empty(uart_bus_t bus):判断TX FIFO是否为空(bus表示当前UART bus串口号)。
uapi_uart_write(uart_bus_t bus, const uint8_t *buffer, uint32_t length, uint32_t timeout):将数据发送到已经打开的UART上,使用直接发送的方式(bus表示当前UART bus串口号,buffer表示要发送的数据Buffer,length表示要发送的数据Buffer长度,timeout表示超时时间,该参数暂未使用(需开启CONFIG_SUPPORT_UART_TX_POLL_TIMEOUT, timeout参数才生效))。(打开CONFIG_UART_SUPPORT_TX宏才能使用)
uapi_uart_write_nolock(uart_bus_t bus, const uint8_t *buffer, uint32_t length, uint32_t timeout):将数据发送到已经打开的UART上,使用直接发送不会锁中断的方式(bus表示当前UART bus串口号,buffer表示要发送的数据Buffer,length表示要发送的数据Buffer长度,timeout表示超时时间,该参数暂未使用(需开启CONFIG_SUPPORT_UART_TX_POLL_TIMEOUT, timeout参数才生效))。(打开CONFIG_UART_SUPPORT_TX宏才能使用)
uapi_uart_write_int(uart_bus_t bus, const uint8_t *buffer, uint32_t length, void *params, uart_tx_callback_t finished_with_buffer_func):使用中断模式将数据发送到已打开的UART上,当数据发送完成,会调用回调函数(bus表示当前UART bus串口号,buffer表示要发送的数据Buffer,length表示要发送的数据Buffer长度,params表示传递到完成传输的回调函数的参数,finished_with_buffer_func表示数据发送完成后的回调函数)。(打开CONFIG_UART_SUPPORT_TX宏才能使用)
uapi_uart_write_by_dma(uart_bus_t bus, const void *buffer, uint32_t length, uart_write_dma_config_t *dma_cfg):通过DMA发送数据(bus表示当前UART bus串口号,buffer表示要发送的数据Buffer,length表示要发送的数据Buffer长度,dma_cfg表示发送数据时的DMA配置)。(打开CONFIG_UART_SUPPORT_TX以及CONFIG_UART_SUPPORT_DMA宏才能使用)
uapi_uart_read_by_dma(uart_bus_t bus, const void *buffer, uint32_t length, uart_write_dma_config_t *dma_cfg):通过DMA接收数据(bus表示当前UART bus串口号,buffer表示存储接收数据的Buffer,length表示存储接收数据的Buffer长度,dma_cfg表示接收数据时的DMA配置)。(打开CONFIG_UART_SUPPORT_TX以及CONFIG_UART_SUPPORT_DMA宏才能使用)
uapi_uart_register_read_by_dma_callback(uart_bus_t bus, uart_write_dma_config_t *dma_cfg):注册中断触发DMA搬运的回调(bus表示当前UART bus串口号,dma_cfg表示接收数据时的DMA配置)。
(打开CONFIG_UART_SUPPORT_TX、CONFIG_UART_SUPPORT_DMA以及CONFIG_UART_SUPPORT_INT_TRIGGER_DMA宏才能使用)
uapi_uart_unregister_read_by_dma_callback(uart_bus_t bus):去注册中断触发DMA搬运的回调(bus表示当前UART bus串口号)。(打开CONFIG_UART_SUPPORT_TX、CONFIG_UART_SUPPORT_DMA以及CONFIG_UART_SUPPORT_INT_TRIGGER_DMA宏才能使用)
uapi_uart_register_write_by_dma_callback(uart_bus_t bus, uart_tx_by_dma_callback_t tx_dma_cb):注册在DMA中断里直接调用DMA写的回调函数(bus表示当前UART bus串口号,tx_dma_cb表示DMA完成中断里调用DMA写的回调函数)。(打开CONFIG_UART_SUPPORT_SEND_IN_DMA_ISR宏才能使用)
uapi_uart_register_rx_callback(uart_bus_t bus, uart_rx_condition_t condition, uint32_t size, uart_rx_callback_t callback):注册接收回调函数,此回调函数会根据触发条件和Size触发(bus表示当前UART bus串口号,condition表示回调触发的条件,size表示如果触发条件涉及到数据长度,该参数就表示需要的数据长度,callback表示接收数据后的回调函数)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_unregister_rx_callback(uart_bus_t bus):取消注册接收回调函数(bus表示当前UART bus串口号)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_register_parity_error_callback(uart_bus_t bus, uart_error_callback_t callback):注册奇偶校验错误处理的回调函数(bus表示当前UART bus串口号,callback表示奇偶校验错误处理回调函数)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_register_frame_error_callback(uart_bus_t bus, uart_error_callback_t callback):注册帧错误处理回调函数(bus表示当前UART bus串口号,callback表示帧错误错误处理回调函数)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_register_overrun_error_callback(uart_bus_t bus, uart_error_callback_t callback):注册溢出错误处理回调函数(bus表示当前UART bus串口号,callback表示溢出错误错误处理回调函数)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_read(uart_bus_t bus, const uint8_t *buffer, uint32_t length, uint32_t timeout):从UART读数据(bus表示当前UART bus串口号,buffer表示存储接收数据的Buffer,length表示存储接收数据的Buffer长度,timeout表示超时时间,该参数暂未使用)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_flush_rx_data(uart_bus_t bus):刷新UART接收Buffer中的数据(bus表示当前UART bus串口号)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_update_rx_buffer(uart_bus_t bus, uint8_t *rx_buffer, uint16_t rx_buffer_size):更新UART接收Buffer的地址和长度(bus表示当前UART bus串口号,rx_buffer表示存储接收数据的Buffer,length表示存储接收数据的Buffer长度)。(打开CONFIG_UART_SUPPORT_RX宏才能使用)
uapi_uart_suspend(uintptr_t arg):挂起所有的UART通道,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_UART_SUPPORT_LPM宏才能使用)
uapi_uart_resume(uintptr_t arg):恢复所有的UART通道,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_UART_SUPPORT_LPM宏才能使用)
uart_port_lli_init_config:配置UART所需管脚的接口,入参为测试需要的UART通道。
uapi_uart_dma_send:使用UART-DMA循环链表发送的接口入参为测试所用的UART、发送数据的buffer地址、发送数据的长度和发送数据后的回调函数。回调函数类型为typedef void (*uart_data_send_cb_t)(uint8_t channel, errcode_t result) ,errcode_t result会返回发送数据时出现错误的类型。该接口调用一次发送一次数据,多包传输需要重复调用。该接口内可以通过(Top) → Drivers → Drivers → UART → Uart Configuration → Whether DMA need send head or not.的Kconfig来控制是否发送包头,如果要发送不定长的数据包,则必须要发送包头。如果发送定长数据包则可以在DMA初始化配置中确认好数据长度。
uapi_uart_dma_recv_register:使用UART-DMA做接收的初始化接口,入参为测试所用的UART、接收数据的buffer地址、接收数据的长度和接收到数据后的回调函数。回调函数类型为typedef bool (*uart_data_recv_cb_t)(uint8_t channel, uint16_t length, errcode_t result),返回值的布尔型告知驱动内是否可以继续接受,errcode_t result会返回接收数据时出现的错误的类型。收数据只需要注册好回调即可自动接收,故只需要调用一次。
uapi_uart_dma_recv_register:恢复UART-DMA循环链表接收的接口,接收方可以选择在uapi_uart_dma_recv_register函数的回调函数里返回false来暂停接收,在需要恢复接收时调用uapi_uart_dma_lli_continue_recv来继续接收。
uapi_uart_update_dma_recv_buff:切换UART-DMA循环链表接收buffer地址的接口,接收方可以使用该接口来实现如乒乓buffer的功能。
中断描述¶
驱动代码在drivers\drivers\hal\uart\v151\hal_uart_v151_regs_op.h文件里声明了UART中断类型,如下图1所示,具体描述可参考表1。
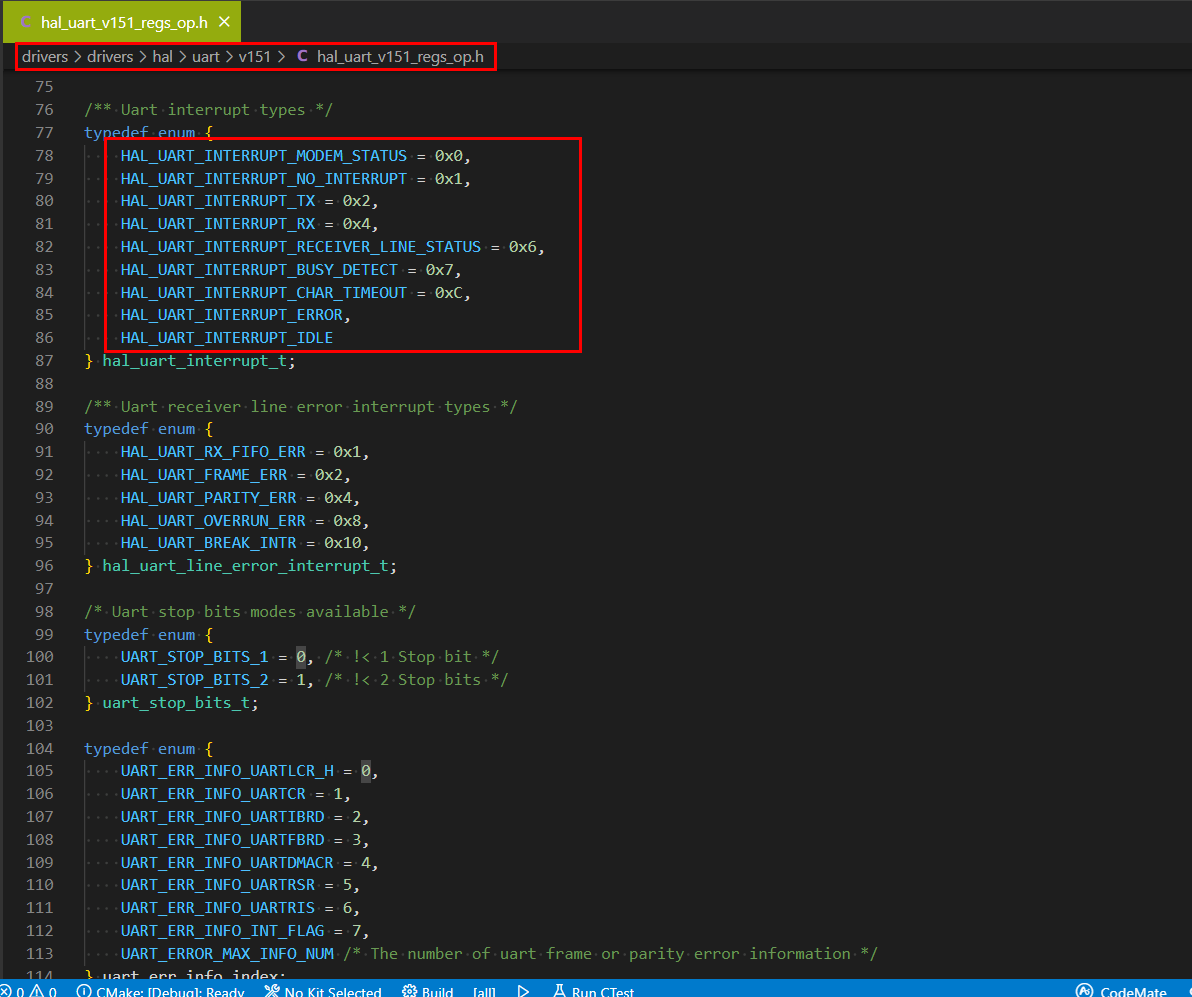
表 1 中断描述
原意是指在过去的4个字符时间内,接收器FIFO中没有字符进出,但在此期间至少有1个字符存在(即RX FIFO中有数,但是未达到水线且tx不再发送数据过来,一段时间后会触发该中断)。实际在本产品同0x4中断 |
|||
KCONFIG配置¶
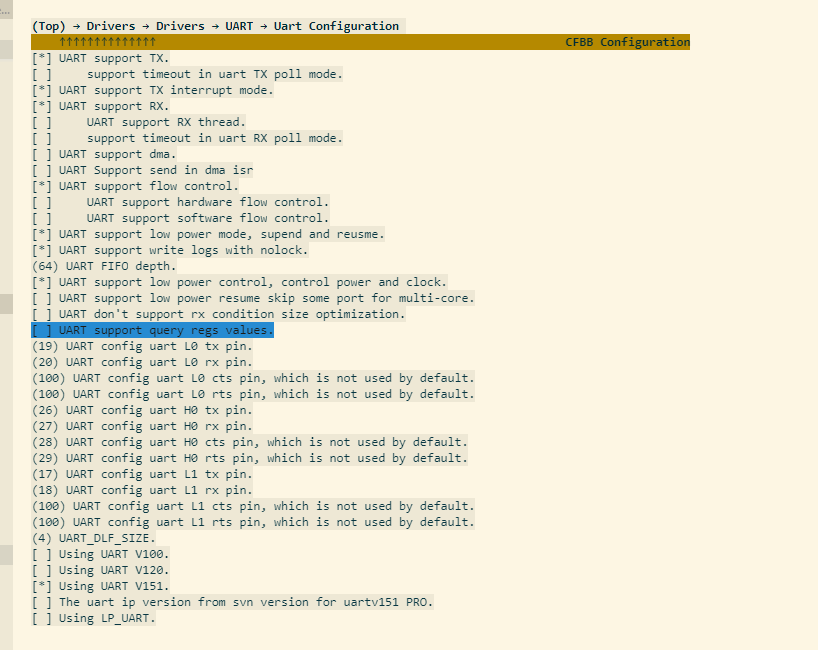
配置宏具体描述如表1所示。
表 1 UART相关宏描述
UART支持DMA模式,视情况选择,若选择采用UART DMA模式,则需同步选择DMA驱动的KCONFIG配置,请参考“KCONFIG配置” |
|||||
UART支持在DMA中断里发送数据,视情况选择,若选择采用UART DMA模式,则需同步选择DMA驱动的KCONFIG配置,请参考“KCONFIG配置” |
|||||
UART support low power resume skip some port for multi-core. |
|||||
开发指引¶
以应用UART1为例,数据收发流程如下:
配置IO复用。将对应的IO分别复用为UART1的TX、RX、RTS、CTS功能。
如果不需要支持硬件流控,仅配置TX、RX即可。
void usr_uart_io_config(void) { /* 如下IO复用配置,也可集中在SDK中的usr_io_init函数中进行配置 */ uapi_pin_set_mode(S_AGPIO5, HAL_PIO_UART_H0_RTS); /* uart1 rts */ uapi_pin_set_mode(S_AGPIO6, HAL_PIO_UART_H0_CTS); /* uart1 cts */ uapi_pin_set_mode(S_AGPIO12, HAL_PIO_UART_H0_TXD); /* uart1 tx */ uapi_pin_set_mode(S_AGPIO13, HAL_PIO_UART_H0_RXD); /* uart1 rx */ }
UART初始化。配置UART的波特率、数据位等属性,并使能UART。
#define TEST_UART_RX_BUFF_SIZE 0x40 unsigned char g_uart_rx_buff[TEST_UART_RX_BUFF_SIZE] = { 0 }; uart_buffer_config_t g_uart_buffer_config = { .rx_buffer = g_uart_rx_buff, .rx_buffer_size = TEST_UART_RX_BUFF_SIZE }; errcode_t usr_uart_init_config(void) { errcode_t errcode; uart_attr_t attr = { .baud_rate = 115200, /* 波特率 */ .data_bits = 3, /* 8bit数据位 */ .stop_bits = 0, /* 1bit停止位 */ .parity = 0, /* 校验位 */ .flow_ctrl = 0 /* 流控 */ }; uart_pin_config_t pin_config = { .tx_pin = S_AGPIO12, /* uart1 tx */ .rx_pin = S_AGPIO13, /* uart1 rx */ .cts_pin = S_AGPIO6, /* 流控功能,可选 */ .rts_pin = S_AGPIO5 /* 流控功能,可选 */ }; uapi_uart_deinit(UART_BUS_1); /* 此处去初始化操作,是为了清除之前在其他地方使用的一些配置,排除干扰 */ errcode = uapi_uart_init(UART_BUS_1, &pin_config, &attr, NULL, &g_uart_buffer_config); if (errcode != ERRCODE_SUCC) { osal_printk("uart init fail\r\n"); } return errcode; }
UART数据收发。调用UART轮询读写数据接口,进行数据收发。
void usr_uart_read_data(void) { int len; unsigned char g_test_uart_rx_buffer[64]; len = uapi_uart_read(UART_BUS_1, g_test_uart_rx_buffer, 64, 0); if(len > 0) { /* process */ } } int usr_uart_write_data(unsigned int size, char* buff) { unsigned char tx_buff[64] = { 0 }; if (memcpy_s(tx_buff, 64, buff, size) != EOK) { return ERRCODE_FAIL; } int ret = uapi_uart_write(UART_BUS_1, tx_buff, size, 0); if(ret == -1) { return ERRCODE_FAIL; } return ERRCODE_SUCC; }
UART DMA模式发送数据流程如下:
配置IO复用。将对应的IO复用为UART1的TX、RX、RTS、CTS功能。
如果不需要支持硬件流控,仅配置TX、RX即可。
void usr_uart_io_config(void) { /* 如下IO复用配置,也可集中在SDK中的usr_io_init函数中进行配置 */ uapi_pin_set_mode(S_MGPIO21, HAL_PIO_UART_H0_RTS); /* uart1 rts */ uapi_pin_set_mode(S_MGPIO22, HAL_PIO_UART_H0_CTS); /* uart1 cts */ uapi_pin_set_mode(S_MGPIO17, HAL_PIO_UART_H0_TXD); /* uart1 tx */ uapi_pin_set_mode(S_MGPIO18, HAL_PIO_UART_H0_RXD); /* uart1 rx */ }
UART初始化。配置UART的波特率、数据位等属性,并使能UART。
errcode_t usr_uart_init_config(void) { errcode_t errcode; uart_attr_t attr = { .baud_rate = 115200, /* 波特率 */ .data_bits = 3, /* 8bit数据位 */ .stop_bits = 0, /* 1bit停止位 */ .parity = 0, /* 校验位 */ .flow_ctrl = 0 /* 流控 */ }; uart_pin_config_t pin_config = { .tx_pin = S_MGPIO17, /* uart1 tx */ .rx_pin = S_MGPIO18, /* uart1 rx */ .cts_pin = S_MGPIO22, /* 流控功能,可选 */ .rts_pin = S_MGPIO21/* 流控功能,可选 */ }; uart_extra_attr_t ext_config = { .tx_dma_enable = true, .tx_int_threshold = UART_FIFO_INT_TX_LEVEL_EQ_0_CHARACTER, .rx_dma_enable = true, .rx_int_threshold = UART_FIFO_INT_RX_LEVEL_1_CHARACTER } errcode = uapi_uart_init(UART_BUS_1, &pin_config, &attr, &ext_config, &g_uart_buffer_config); if (errcode != ERRCODE_SUCC) { osal_printk("uart init fail\r\n"); } return errcode; }
UART DMA数据收发。
#define TEST_UART_DMA_SEND_BUFF_SIZE 1024 static errcode_t test_uart_read_by_dma(void) { int len; unsigned char g_test_uart_rx_buffer[TEST_UART_DMA_SEND_BUFF_SIZE] = { 0 }; uart_write_dma_config_t dma_cfg = { .src_width = HAL_DMA_TRANSFER_WIDTH_8, /* 0代表8bit */ .dest_width = HAL_DMA_TRANSFER_WIDTH_8, /* 0代表8bit */ .burst_length = HAL_DMA_BURST_TRANSACTION_LENGTH_1, /* 代表1字节 */ .priority = 0 /* 优先级0 */ }; len = uapi_uart_read_by_dma(UART_BUS_1, g_test_uart_rx_buffer, TEST_UART_DMA_SEND_BUFF_SIZE, &dma_cfg); if(len > 0) { /* process */ } } static errcode_t test_uart_write_by_dma(void) { uint8_t dma_buff[TEST_UART_DMA_SEND_BUFF_SIZE] = { 0 }; if (memset_s(dma_buff, TEST_UART_DMA_SEND_BUFF_SIZE, 0XA5, TEST_UART_DMA_SEND_BUFF_SIZE) != 0) { return ERRCODE_FAIL; } uart_write_dma_config_t dma_cfg = { .src_width = HAL_DMA_TRANSFER_WIDTH_8, /* 0代表8bit */ .dest_width = HAL_DMA_TRANSFER_WIDTH_8, /* 0代表8bit */ .burst_length = HAL_DMA_BURST_TRANSACTION_LENGTH_1, /* 代表1字节 */ .priority = 0 /* 优先级0 */ }; if (uapi_uart_write_by_dma(UART_BUS_1, dma_buff, len, &dma_cfg) != len) { osal_printk("[UART] *** memory to uart fail!\r\n"); return ERRCODE_FAIL; } return ERRCODE_SUCC; }
三种模式(轮询模式、中断模式、DMA模式)下的UART收发完整代码流程可参考以下代码:
#include "pinctrl.h"
#include "uart.h"
#include "watchdog.h"
#include "soc_osal.h"
#include "app_init.h"
#if defined(CONFIG_UART_SUPPORT_DMA)
#include "dma.h"
#include "hal_dma.h"
#endif
#define UART_BAUDRATE 115200
#define CONFIG_UART_INT_WAIT_MS 5
#define UART_TASK_PRIO 24
#define UART_TASK_STACK_SIZE 0x1000
static uint8_t g_app_uart_rx_buff[CONFIG_UART_TRANSFER_SIZE] = { 0 };
#if defined(CONFIG_UART_SUPPORT_INT_MODE)
static uint8_t g_app_uart_int_rx_flag = 0;
static volatile uint8_t g_app_uart_int_index = 0;
static uint8_t g_app_uart_int_rx_buff[CONFIG_UART_TRANSFER_SIZE] = { 0 };
#endif
static uart_buffer_config_t g_app_uart_buffer_config = {
.rx_buffer = g_app_uart_rx_buff,
.rx_buffer_size = CONFIG_UART_TRANSFER_SIZE
};
#if defined(CONFIG_UART_SUPPORT_DMA)
uart_write_dma_config_t g_app_dma_cfg = {
.src_width = HAL_DMA_TRANSFER_WIDTH_8,
.dest_width = HAL_DMA_TRANSFER_WIDTH_8,
.burst_length = HAL_DMA_BURST_TRANSACTION_LENGTH_1,
.priority = HAL_DMA_CH_PRIORITY_0
};
#endif
static void app_uart_init_pin(void)
{
#if defined(CONFIG_PINCTRL_SUPPORT_IE)
uapi_pin_set_ie(CONFIG_UART_RXD_PIN, PIN_IE_1);
#endif /* CONFIG_PINCTRL_SUPPORT_IE */
uapi_pin_set_mode(CONFIG_UART_TXD_PIN, CONFIG_UART_TXD_PIN_MODE);
uapi_pin_set_mode(CONFIG_UART_RXD_PIN, CONFIG_UART_RXD_PIN_MODE);
}
static void app_uart_init_config(void)
{
uart_attr_t attr = {
.baud_rate = UART_BAUDRATE,
.data_bits = UART_DATA_BIT_8,
.stop_bits = UART_STOP_BIT_1,
.parity = UART_PARITY_NONE,
.flow_ctrl = 0 /* 流控,配0表示不开流控 */
};
uart_pin_config_t pin_config = {
.tx_pin = CONFIG_UART_TXD_PIN,
.rx_pin = CONFIG_UART_RXD_PIN,
.cts_pin = PIN_NONE,
.rts_pin = PIN_NONE
};
#if defined(CONFIG_UART_SUPPORT_DMA)
uart_extra_attr_t extra_attr = {
.tx_dma_enable = true,
.tx_int_threshold = UART_FIFO_INT_TX_LEVEL_EQ_0_CHARACTER,
.rx_dma_enable = true,
.rx_int_threshold = UART_FIFO_INT_RX_LEVEL_1_CHARACTER
};
uapi_dma_init();
uapi_dma_open();
uapi_uart_deinit(CONFIG_UART_BUS_ID); /* 在此处调用仅表示排除在其他地方使用的配置,排除干扰。*/
uapi_uart_init(CONFIG_UART_BUS_ID, &pin_config, &attr, &extra_attr, &g_app_uart_buffer_config);
#else
uapi_uart_deinit(CONFIG_UART_BUS_ID);
uapi_uart_init(CONFIG_UART_BUS_ID, &pin_config, &attr, NULL, &g_app_uart_buffer_config);
#endif
}
#if defined(CONFIG_UART_SUPPORT_INT_MODE)
static void app_uart_read_int_handler(const void *buffer, uint16_t length, bool error)
{
unused(error);
if (buffer == NULL || length == 0) {
osal_printk("uart%d int mode transfer illegal data!\r\n", CONFIG_UART_BUS_ID);
return;
}
uint8_t *buff = (uint8_t *)buffer;
if (memcpy_s(g_app_uart_rx_buff, length, buff, length) != EOK) {
osal_printk("uart%d int mode data copy fail!\r\n", CONFIG_UART_BUS_ID);
return;
}
if (memcpy_s(g_app_uart_int_rx_buff + g_app_uart_int_index, length, g_app_uart_rx_buff, length) != EOK) {
g_app_uart_int_index = 0;
osal_printk("uart%d int mode data2 copy fail!\r\n", CONFIG_UART_BUS_ID);
}
g_app_uart_int_index += length;
g_app_uart_int_rx_flag = 1;
}
static void app_uart_write_int_handler(const void *buffer, uint32_t length, const void *params)
{
unused(params);
uint8_t *buff = (void *)buffer;
for (uint8_t i = 0; i < length; i++) {
osal_printk("uart%d write data[%d] = %d\r\n", CONFIG_UART_BUS_ID, i, buff[i]);
}
}
static void app_uart_register_rx_callback(void)
{
osal_printk("uart%d int mode register receive callback start!\r\n", CONFIG_UART_BUS_ID);
if (uapi_uart_register_rx_callback(CONFIG_UART_BUS_ID, UART_RX_CONDITION_FULL_OR_SUFFICIENT_DATA_OR_IDLE,
1, app_uart_read_int_handler) == ERRCODE_SUCC) {
osal_printk("uart%d int mode register receive callback succ!\r\n", CONFIG_UART_BUS_ID);
}
}
#endif
static void *uart_task(const char *arg)
{
unused(arg);
#if defined(CONFIG_UART_SUPPORT_DMA)
int32_t ret = CONFIG_UART_TRANSFER_SIZE;
#if defined(CONFIG_UART_USING_V151)
ret = ERRCODE_SUCC;
#endif
#endif
/* UART pinmux. */
app_uart_init_pin();
/* UART init config. */
app_uart_init_config();
#if defined(CONFIG_UART_SUPPORT_INT_MODE)
app_uart_register_rx_callback();
#endif
while (1) {
#if defined(CONFIG_UART_SUPPORT_INT_MODE)
while (g_app_uart_int_rx_flag != 1) { osal_msleep(CONFIG_UART_INT_WAIT_MS); }
g_app_uart_int_rx_flag = 0;
osal_printk("uart%d int mode send back!\r\n", CONFIG_UART_BUS_ID);
if (uapi_uart_write_int(CONFIG_UART_BUS_ID, g_app_uart_int_rx_buff, CONFIG_UART_TRANSFER_SIZE, 0,
app_uart_write_int_handler) == ERRCODE_SUCC) {
osal_printk("uart%d int mode send back succ!\r\n", CONFIG_UART_BUS_ID);
}
#elif defined(CONFIG_UART_SUPPORT_DMA)
osal_printk("uart%d dma mode receive start!\r\n", CONFIG_UART_BUS_ID);
if (uapi_uart_read_by_dma(CONFIG_UART_BUS_ID, g_app_uart_rx_buff, CONFIG_UART_TRANSFER_SIZE,
&g_app_dma_cfg) == ret) {
osal_printk("uart%d dma mode receive succ!\r\n", CONFIG_UART_BUS_ID);
}
osal_printk("uart%d dma mode send back!\r\n", CONFIG_UART_BUS_ID);
if (uapi_uart_write_by_dma(CONFIG_UART_BUS_ID, g_app_uart_rx_buff, CONFIG_UART_TRANSFER_SIZE,
&g_app_dma_cfg) == ret) {
osal_printk("uart%d dma mode send back succ!\r\n", CONFIG_UART_BUS_ID);
}
#else
osal_printk("uart%d poll mode receive start!\r\n", CONFIG_UART_BUS_ID);
(void)uapi_watchdog_kick();
if (uapi_uart_read(CONFIG_UART_BUS_ID, g_app_uart_rx_buff, CONFIG_UART_TRANSFER_SIZE,
0) == CONFIG_UART_TRANSFER_SIZE) {
osal_printk("uart%d poll mode receive succ!\r\n", CONFIG_UART_BUS_ID);
}
osal_printk("uart%d poll mode send back!\r\n", CONFIG_UART_BUS_ID);
if (uapi_uart_write(CONFIG_UART_BUS_ID, g_app_uart_rx_buff, CONFIG_UART_TRANSFER_SIZE,
0) == CONFIG_UART_TRANSFER_SIZE) {
osal_printk("uart%d poll mode send back succ!\r\n", CONFIG_UART_BUS_ID);
}
#endif
}
return NULL;
}
static void uart_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)uart_task, 0, "UartTask", UART_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, UART_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the uart_entry. */
app_run(uart_entry);
------------------------------------------------------------------
双板UART DMA链表收发完整代码流程可参考以下代码:
master侧代码:
#include <string.h>
#include <stdlib.h>
#include <time.h>
#include "app_init.h"
#include "osal_task.h"
#include "dma.h"
#include "uart.h"
#include "osal_debug.h"
#define UART_TASK_PRIO 24
#define UART_TASK_DURATION_MS 500
#define UART_TASK_STACK_SIZE 0x1000
#define UART_PAYLOAD_LEN 255
rn uart_pin_config_t g_pin_config_map[UART_BUS_MAX_NUM];
static uint8_t g_app_uart_tx_payload_buff[UART_PAYLOAD_LEN] = { 0 };
static uint8_t g_app_uart_rx_payload_buff[UART_PAYLOAD_LEN] = { 0 };
volatile uint32_t g_success = 0;
volatile uint32_t g_fail = 0;
static void uart_dma_lli_write_cb(uint8_t channel, errcode_t result)
{
unused(result);
unused(channel);
}
static bool uart_dma_lli_read_cb(uint8_t channel, uint16_t length, errcode_t result)
{
unused(channel);
unused(length);
unused(result);
if (memcmp(g_app_uart_rx_payload_buff, g_app_uart_tx_payload_buff, UART_PAYLOAD_LEN) == 0) {
g_success++;
} else {
g_fail++;
for (uint32_t i = 0; i < UART_PAYLOAD_LEN; i++) {
osal_printk("[%d] tx:0x%x,rx:0x%x\r\n", i, g_app_uart_tx_payload_buff[i], g_app_uart_rx_payload_buff[i]);
}
}
if ((g_success + g_fail) % 0x400 == 0) {
osal_printk("g_success:%d\r\n", g_success);
osal_printk("g_fail:%d\r\n", g_fail);
}
for (uint16_t i = 0; i < UART_PAYLOAD_LEN; i++) {
g_app_uart_tx_payload_buff[i] = rand() % 0xff;
}
uapi_uart_dma_send(CONFIG_UART_BUS_ID, g_app_uart_tx_payload_buff, UART_PAYLOAD_LEN, uart_dma_lli_write_cb);
return true;
}
static void uart_dma_lli_master_entry(void)
{
for (uint16_t i = 0; i < UART_PAYLOAD_LEN; i++) {
g_app_uart_tx_payload_buff[i] = rand() % 0xff;
}
uapi_pin_set_pull(g_pin_config_map[bus].rx_pin, PIN_PULL_UP);
uart_port_lli_init_config(CONFIG_UART_BUS_ID);
uapi_uart_dma_recv_register(CONFIG_UABUS_ID, g_app_uart_rx_payload_buff, UART_PAYLOAD_LEN, uart_dma_lli_read_cb);
uapi_uart_dma_send(CONFIG_UART_BUS_ID, g_app_uart_tx_payload_buff, UART_PAYLOAD_LEN, uart_dma_lli_write_cb);
return;
}
/* Run the uart_dma_lli_master_entry. */
app_run(uart_dma_lli_master_entry);
#include "app_init.h"
#include "uart.h"
#include "osal_debug.h"
#define UART_TASK_PRIO 24
#define UART_TASK_DURATION_MS 500
#define UART_TASK_STACK_SIZE 0x1000
#define UART_PAYLOAD_LEN 255
extern uart_pin_config_t g_pin_config_map[UART_BUS_MAX_NUM];
static uint8_t g_app_uart_tx_payload_buff[UART_PAYLOAD_LEN] = { 0 };
static uint8_t g_app_uart_rx_payload_buff[UART_PAYLOAD_LEN] = { 0 };
static uint8_t g_app_uart_rx_payload_buff1[UART_PAYLOAD_LEN] = { 0 };
static bool g_double_rx_buffer = true;
volatile uint32_t g_recv_count = 0;
static void uart_dma_lli_write_cb(uint8_t channel, errcode_t result)
{
unused(result & channel);
}
static bool uart_dma_lli_read_cb(uint8_t channel, uint16_t length, errcode_t result)
{
unused(channel);
unused(length);
unused(result);
if (g_recv_count++ % 0x200 == 0) {
osal_printk("g_recv_count:%d\r\n", g_recv_count);
}
if (g_double_rx_buffer) {
uapi_uart_dma_send(CONFIG_UART_BUS_ID, g_app_uart_rx_payload_buff, UART_PAYLOAD_LEN, uart_dma_lli_write_cb);
uapi_uart_update_dma_recv_buff(CONFIG_UART_BUS_ID, g_app_uart_rx_payload_buff1, UART_PAYLOAD_LEN);
g_double_rx_buffer = false;
} else {
uapi_uart_dma_send(CONFIG_UART_BUS_ID, g_app_uart_rx_payload_buff1, UART_PAYLOAD_LEN, uart_dma_lli_write_cb);
uapi_uart_update_dma_recv_buff(CONFIG_UART_BUS_ID, g_app_uart_rx_payload_buff, UART_PAYLOAD_LEN);
g_double_rx_buffer = true;
}
return true;
}
static void uart_dma_lli_slave_entry(void)
{
uapi_pin_set_pull(g_pin_config_map[bus].rx_pin, PIN_PULL_UP);
uart_port_lli_init_config(CONFIG_UART_BUS_ID);
uapi_uart_dma_recv_register(CONFIG_UART_BUS_ID, g_app_uart_rx_payload_buff, UART_PAYLOAD_LEN,
uart_dma_lli_read_cb);
return;
}
/* Run the uart_dma_lli_slave_entry. */
app_run(uart_dma_lli_slave_entry);
注意事项¶
SDK中,UART0(UART_L0)默认作为程序烧写、Testsuite、AT以及数据打印共享串口。
SDK中,UART1(UART_H0)默认作为DebugKits工具维测数据通道。
当使用DMA传输时,UART的RX管脚需要在初始化时配置为输入上拉。
UART的管脚配置在drivers/chips/bs2x/porting/uart/uart_porting.c的全局变量g_pin_config_map中生效。
SPI¶
概述¶
SPI(Serial Peripheral Interface)是一种高速、全双工、同步的通信总线。它可以使MCU与各种外围设备以串行方式进行通信以交换信息。SPI总线可直接与各个厂家生产的多种标准外围器件相连,包括FLASH、RAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。标准SPI总线一般使用4条线:串行时钟线(SCLK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线CS 。
本产品提供SPI0~SPI2共3组可配置的全双工标准SPI外设,SPI规格如下:
3组都支持Master/Slave模式。
每个SPI具有收发分开的位宽为32bit×8的FIFO。
支持最大传输位宽为32bit。
3组都支持单线(标准)、三线模式。
功能描述¶
SPI主模式支持轮询模式读写、中断模式读写以及DMA模式读写;从模式支持中断模式读写和DMA模式读写。
BS2X SPI支持单线SPI和三线SPI:
单线SPI,即为标准SPI,它共有四个引脚:CLK、CS、MISO、MOSI,标准SPI是全双工的,MISO、MOSI分别负责不同方向的传输数据,收发数据可同时进行。库上默认配置即为标准SPI,除管脚配置外无需进行修改。
三线SPI,总共有三个引脚:CLK、CS、MOSI,此时的SPI为半双工的,数据收发只有一根线,主机只发送或只接收从机的数据,收发不能同时进行。
SPI模块提供的接口及功能如下:
uapi_spi_init(spi_bus_t bus, spi_attr_t *attr, spi_extra_attr_t *extra_attr):初始化SPI(包括:主从设备、极性、相性、帧协议、传输频率、传输位宽等设定)(bus表示当前使用的SPI bus,attr表示SPI的基础配置参数,extra_attr表示SPI的高级配置参数)。
uapi_spi_deinit(spi_bus_t bus):去初始化SPI(关闭相应的SPI单元,释放资源)(bus表示当前使用的SPI bus)。
uapi_spi_set_tmod(spi_bus_t bus, hal_spi_trans_mode_t tmod, uint8_t data_frame_num):设置SPI的传输模式(bus表示当前使用的SPI bus,tmod表示SPI传输模式,data_frame_num表示SPI RX数据帧的数量)。
uapi_spi_set_attr(spi_bus_t bus, spi_attr_t *attr):设置SPI的基础配置参数(bus表示当前使用的SPI bus,attr表示SPI的基础配置参数)。
uapi_spi_get_attr(spi_bus_t bus, spi_attr_t *attr): 获取SPI的基础配置参数(主从模式、时钟极性、时钟相位、时钟分频系数、SPI工作频率、串行传输协议、SPI帧格式、SPI帧长度、SPI传输模式等)(bus表示当前使用的SPI bus,attr表示SPI的基础配置参数)。
uapi_spi_set_extra_attr(spi_bus_t bus, spi_extra_attr_t *extra_attr):设置SPI的高级配置参数(bus表示当前使用的SPI bus,attr表示SPI的高级配置参数)。
uapi_spi_get_extra_attr(spi_bus_t bus, spi_extra_attr_t *extra_attr):获取SPI的高级配置参数(SPI是否使用DMA发送数据、SPI是否使用DMA接收数据、QSPI参数等)(bus表示当前使用的SPI bus,attr表示SPI的高级配置参数)。
uapi_spi_set_dma_mode(spi_bus_t bus, bool en, const spi_dma_config_t *dma_cfg):使能/去使能DMA模式下SPI传输(bus表示当前使用的SPI bus,en表示是否使能DMA传输,dma_cfg表示SPI DMA的相关配置)。(打开CONFIG_SPI_SUPPORT_DMA且不打开CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH宏才能使用)
uapi_spi_set_irq_mode(spi_bus_t bus, bool irq_en, spi_rx_callback_t rx_callback, spi_tx_callback_t tx_callback):使能/去使能中断模式在主机模式下传输SPI数据(bus表示当前使用的SPI bus,irq_en表示是否使能中断传输,rx_callback表示接收数据完成时的回调函数,tx_callback表示数据发送完成时的回调函数)。(打开CONFIG_SPI_SUPPORT_INTERRUPT且不打开CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH宏才能使用)
uapi_spi_set_loop_back_mode(spi_bus_t bus, bool loopback_en):设置环回测试模式(bus表示当前使用的SPI bus,loopback_en表示是否使能环回模式传输)。(打开CONFIG_SPI_SUPPORT_LOOPBACK宏才能使用,本产品暂未实现)
uapi_spi_set_crc_mode(spi_bus_t bus, const spi_crc_config_t *crc_config, spi_crc_err_callback_t cb):设置SPI发送和接收CRC模式(bus表示当前使用的SPI bus,crc_config表示配置SPI的crc参数,cb表示crc检验错误回调函数)。(打开CONFIG_SPI_SUPPORT_CRC宏才能使用,本产品暂未实现)
uapi_spi_select_slave(spi_bus_t bus, spi_slave_t cs):Master模式下选择需要对通的Slave设备(bus表示当前使用的SPI bus,cs表示被选中的Slave设备)。(打开CONFIG_SPI_SUPPORT_MASTER宏才能使用)
uapi_spi_master_write(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI主机向从机发送数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_MASTER宏才能使用)
uapi_spi_master_read(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI主机从从机读取数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_MASTER宏才能使用)
uapi_spi_master_writeread(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI主机全双工收发数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_MASTER宏才能使用)
uapi_spi_slave_write(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI从机向主机发送数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_SLAVE宏才能使用)
uapi_spi_slave_read(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI从机从主机读取数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_SLAVE宏才能使用)
uapi_spi_slave_writeread(spi_bus_t bus, const spi_xfer_data_t *data, uint32_t timeout):SPI从机全双工收发数据(bus表示当前使用的SPI bus,data表示SPI传输的数据,timeout表示当前传输的超时时间)。(打开CONFIG_SPI_SUPPORT_SLAVE宏才能使用)
uapi_spi_suspend(uintptr_t arg):挂起所有SPI通道,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_SPI_SUPPORT_LPM宏才能使用)
uapi_spi_resume(uintptr_t arg):恢复所有SPI通道,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_SPI_SUPPORT_LPM宏才能使用)
spi_porting_set_rx_mode(spi_bus_t bus, uint16_t num):将SPI配置为EEPROM模式接收数据,num表示多少个数据进行一次传输。
spi_porting_set_tx_mode(spi_bus_t bus):将SPI配置为TX模式发送数据。
spi_porting_set_txrx_mode(spi_bus_t bus):将SPI配置为TXRX模式收发数据。
KCONFIG配置¶
单线(标准)SPI Kconfig宏配置如下:
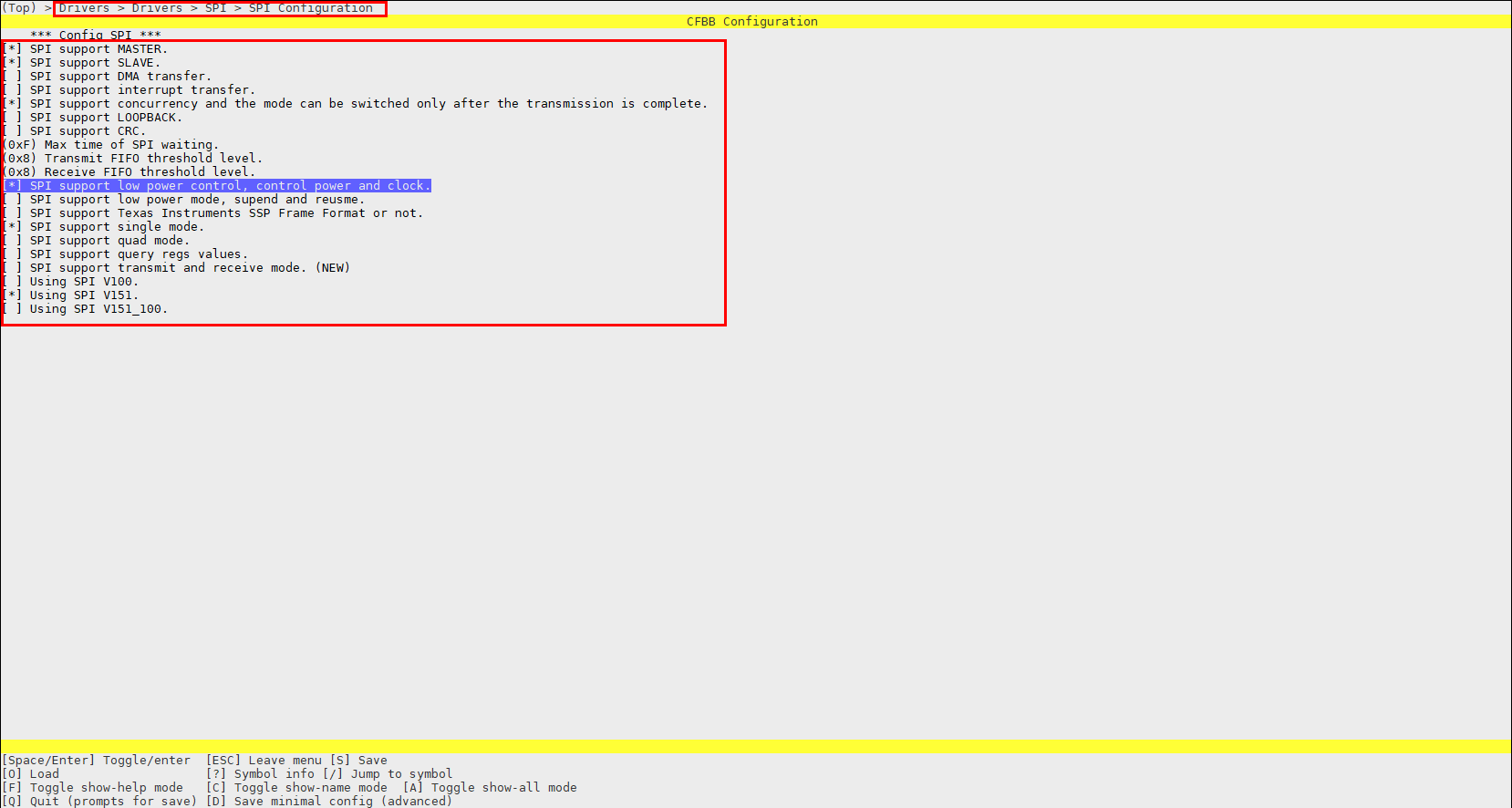

配置宏具体描述如表1所示。
表 1 SPI相关宏描述
SPI支持DMA模式,视情况选择,若选择采用SPI DMA模式,则需同步选择DMA驱动的KCONFIG配置,请参考“KCONFIG配置”。 |
|||||
SPI indicates the threshold of the automatic switchover mode. |
|||||
SPI support concurrency and the mode can be switched only after the transmission is complete. |
|||||
SPI Max Bus num, the BS2x chip supports a maximum of 3 buses. |
该宏表示SPI BUS的最大数量,默认值是1,若使用除SPI BUS0以外的BUS,则必须对应修改该宏,否则会出现异常情况 |
开发指引¶
SPI用于对接支持SPI协议的设备,SPI单元可以作为主设备或从设备。以SPI单元作为主设备为例,写数据操作如下:
通过IO复用,复用SPI功能用到的管脚为SPI功能。
管脚复用各功能请参考platform_core.h中各个管脚功能的定义。
#define SPI_PIN_MISO_PINMUX HAL_PIO_SPI2_RXD #define SPI_PIN_MOSI_PINMUX HAL_PIO_SPI2_TXD #define SPI_PIN_CLK_PINMUX HAL_PIO_SPI2_CLK #define SPI_PIN_CS_PINMUX HAL_PIO_SPI2_CS0 #define SPI_PIN_MISO S_MGPIO16 #define SPI_PIN_MOSI S_MGPIO17 #define SPI_PIN_CLK S_MGPIO18 #define SPI_PIN_CS S_MGPIO19 void usr_spi_io_init(void) { /* 设置spi pinmux */ uapi_pin_set_mode(SPI_PIN_MISO, SPI_PIN_MISO_PINMUX); /* 设置 spi miso pinmux */ uapi_pin_set_mode(SPI_PIN_MOSI, SPI_PIN_MOSI_PINMUX); /* 设置 spi mosi pinmux */ uapi_pin_set_mode(SPI_PIN_CLK, SPI_PIN_CLK_PINMUX); /* 设置 spi clk pinmux */ uapi_pin_set_mode(SPI_PIN_CS, SPI_PIN_CS_PINMUX); /* 设置 spi cs pinmux */ }
调用uapi_spi_init,初始化SPI资源,选择SPI功能单元以及配置SPI参数。
#define TEST_SPI SPI_BUS_2 #define BUS_CLOCK 32000000 /* 32M */ #define SPI_FREQUENCY 2 errcode_t usr_spi_init(void) { spi_attr_t config = { 0 }; spi_extra_attr_t ext_config = { 0 }; ext_config.sspi_param.wait_cycles = 0x10; usr_spi_io_init(); config.freq_mhz = SPI_FREQUENCY; /* spi 分频后工作频率 */ config.is_slave = false; /* 主机模式 */ config.frame_size = HAL_SPI_FRAME_SIZE_8; /* spi 帧大小,使用8位 */ config.salve_num = 1; /* 使用片选 0 */ config.spi_frame_format = HAL_SPI_FRAME_FORMAT_STANDARD; /* spi传输模式:标准spi */ config.bus_clk = BUS_CLOCK; /* spi时钟源频率 */ config.frame_format = SPI_CFG_FRAME_FORMAT_MOTOROLA_SPI; /* spi协议格式:摩托罗拉SPI协议格式 */ config.tmod = HAL_SPI_TRANS_MODE_TXRX; /* spi传输模式:收发模式 */ config.clk_phase = SPI_CFG_CLK_CPHA_0; /* spi相位:SPI_CFG_CLK_CPHA_0 */ config.clk_polarity = SPI_CFG_CLK_CPOL_0; /* spi极性:SPI_CFG_CLK_CPOL_0 */ /* 初始化spi */ errcode_t err = uapi_spi_init(TEST_SPI, &config, &ext_config); return err; }
调用uapi_spi_master_writeread,进行SPI主设备写读操作。
以主设备写读数据为例:
errcode_t usr_spi_writeread(uint8_t *wdata, uint8_t wlen, uint8_t *rdata, uint8_t rlen) { spi_xfer_data_t spi_recv_xfer = { 0 }; spi_recv_xfer.tx_buff = wdata; /* 设置 tx buff */ spi_recv_xfer.tx_bytes = wlen; /* 设置 tx buff 长度 */ spi_recv_xfer.rx_buff = rdata; /* 设置 rx buff */ spi_recv_xfer.rx_bytes = rlen; /* 设置 rx buff 长度 */ spi_porting_set_rx_mode(TEST_SPI, rlen); /* 设置 写读接口的 rx 接收模式*/ return uapi_spi_master_writeread(TEST_SPI, &spi_recv_xfer, 100); /* 读取数据 */ }
双板SPI三种模式(轮询模式、中断模式、DMA模式)下主从收发完整代码流程可参考以下代码:
#include "pinctrl.h"
#include "spi.h"
#include "soc_osal.h"
#include "app_init.h"
#include "dma.h"
#define SPI_SLAVE_NUM 1
#define SPI_FREQUENCY 2
#define SPI_CLK_POLARITY 0
#define SPI_CLK_PHASE 0
#define SPI_FRAME_FORMAT 0
#define SPI_FRAME_FORMAT_STANDARD 0
#define SPI_FRAME_SIZE 0x1f
#define SPI_TMOD 0
#define SPI_WAIT_CYCLES 0x10
#if defined(CONFIG_SPI_SUPPORT_DMA) && !(defined(CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH))
#define SPI_DMA_WIDTH 2
#endif
#if defined(CONFIG_SPI_MASTER_SUPPORT_QSPI)
#define QSPI_WRITE_CMD 0x38
#define QSPI_WRITE_ADDR 0x123
#endif
#define SPI_TASK_DURATION_MS 500
#define SPI_TASK_PRIO 24
#define SPI_TASK_STACK_SIZE 0x1000
static void app_spi_init_pin(void)
{
#if defined(CONFIG_PINCTRL_SUPPORT_IE)
uapi_pin_set_ie(CONFIG_SPI_MASTER_DI_PIN, PIN_IE_1);
#endif /* CONFIG_PINCTRL_SUPPORT_IE */
uapi_pin_set_mode(CONFIG_SPI_MASTER_CLK_PIN, CONFIG_SPI_MASTER_CLK_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_MASTER_CS_PIN, CONFIG_SPI_MASTER_CS_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_MASTER_DI_PIN, CONFIG_SPI_MASTER_DI_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_MASTER_DO_PIN, CONFIG_SPI_MASTER_DO_PIN_MODE);
}
#if defined(CONFIG_SPI_SUPPORT_INTERRUPT) && (CONFIG_SPI_SUPPORT_INTERRUPT == 1)
static void app_spi_master_write_int_handler(const void *buffer, uint32_t length)
{
unused(buffer);
unused(length);
osal_printk("spi master write interrupt start!\r\n");
}
static void app_spi_master_rx_callback(const void *buffer, uint32_t length, bool error)
{
if (buffer == NULL || length == 0) {
osal_printk("spi master transfer illegal data!\r\n");
return;
}
if (error) {
osal_printk("app_spi_master_read_int error!\r\n");
return;
}
uint8_t *buff = (uint8_t *)buffer;
for (uint32_t i = 0; i < length; i++) {
osal_printk("buff[%d] = %x\r\n", i, buff[i]);
}
osal_printk("app_spi_master_read_int success!\r\n");
}
#endif /* CONFIG_SPI_SUPPORT_INTERRUPT */
static void app_spi_master_init_config(void)
{
spi_attr_t config = { 0 };
spi_extra_attr_t ext_config = { 0 };
config.is_slave = false;
config.slave_num = SPI_SLAVE_NUM;
config.bus_clk = SPI_CLK_FREQ;
config.freq_mhz = SPI_FREQUENCY;
config.clk_polarity = SPI_CLK_POLARITY;
config.clk_phase = SPI_CLK_PHASE;
config.frame_format = SPI_FRAME_FORMAT;
config.spi_frame_format = HAL_SPI_FRAME_FORMAT_STANDARD;
config.frame_size = SPI_FRAME_SIZE;
config.tmod = SPI_TMOD;
config.sste = 0;
ext_config.qspi_param.wait_cycles = SPI_WAIT_CYCLES;
uapi_spi_init(CONFIG_SPI_MASTER_BUS_ID, &config, &ext_config);
#if defined(CONFIG_SPI_SUPPORT_DMA) && (CONFIG_SPI_SUPPORT_DMA == 1)
uapi_dma_init();
uapi_dma_open();
#ifndef CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH
spi_dma_config_t dma_cfg = {
.src_width = SPI_DMA_WIDTH,
.dest_width = SPI_DMA_WIDTH,
.burst_length = 0,
.priority = 0
};
if (uapi_spi_set_dma_mode(CONFIG_SPI_MASTER_BUS_ID, true, &dma_cfg) != ERRCODE_SUCC) {
osal_printk("spi%d master set dma mode fail!\r\n");
}
#endif
#endif /* CONFIG_SPI_SUPPORT_DMA */
#if defined(CONFIG_SPI_SUPPORT_INTERRUPT) && (CONFIG_SPI_SUPPORT_INTERRUPT == 1)
if (uapi_spi_set_irq_mode(CONFIG_SPI_MASTER_BUS_ID, true, app_spi_master_rx_callback,
app_spi_master_write_int_handler) == ERRCODE_SUCC) {
osal_printk("spi%d master set irq mode succ!\r\n", CONFIG_SPI_MASTER_BUS_ID);
}
#endif /* CONFIG_SPI_SUPPORT_INTERRUPT */
}
static void *spi_master_task(const char *arg)
{
unused(arg);
/* SPI pinmux. */
app_spi_init_pin();
/* SPI master init config. */
app_spi_master_init_config();
/* SPI data config. */
uint8_t tx_data[CONFIG_SPI_TRANSFER_LEN] = { 0 };
for (uint32_t loop = 0; loop < CONFIG_SPI_TRANSFER_LEN; loop++) {
tx_data[loop] = (loop & 0xFF);
}
uint8_t rx_data[CONFIG_SPI_TRANSFER_LEN] = { 0 };
spi_xfer_data_t data = {
.tx_buff = tx_data,
.tx_bytes = CONFIG_SPI_TRANSFER_LEN,
.rx_buff = rx_data,
.rx_bytes = CONFIG_SPI_TRANSFER_LEN,
#if defined(CONFIG_SPI_MASTER_SUPPORT_QSPI)
.cmd = QSPI_WRITE_CMD,
.addr = QSPI_WRITE_ADDR,
#endif
};
while (1) {
osal_msleep(SPI_TASK_DURATION_MS);
#ifndef CONFIG_SPI_MASTER_SUPPORT_WRITEREAD
osal_printk("spi%d master send start!\r\n", CONFIG_SPI_MASTER_BUS_ID);
if (uapi_spi_master_write(CONFIG_SPI_MASTER_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
osal_printk("spi%d master send succ!\r\n", CONFIG_SPI_MASTER_BUS_ID);
} else {
continue;
}
osal_printk("spi%d master receive start!\r\n", CONFIG_SPI_MASTER_BUS_ID);
if (uapi_spi_master_read(CONFIG_SPI_MASTER_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
#ifndef CONFIG_SPI_SUPPORT_INTERRUPT
for (uint32_t i = 0; i < data.rx_bytes; i++) {
osal_printk("spi%d master receive data is %x\r\n", CONFIG_SPI_MASTER_BUS_ID, data.rx_buff[i]);
}
#endif
osal_printk("spi%d master receive succ!\r\n", CONFIG_SPI_MASTER_BUS_ID);
}
#else
osal_printk("spi%d master writeread start!\r\n", CONFIG_SPI_MASTER_BUS_ID);
if (uapi_spi_master_writeread(CONFIG_SPI_MASTER_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
for (uint32_t i = 0; i < data.rx_bytes; i++) {
osal_printk("spi%d master writeread data is %x\r\n", CONFIG_SPI_MASTER_BUS_ID, data.rx_buff[i]);
}
osal_printk("spi%d master writeread succ!\r\n", CONFIG_SPI_MASTER_BUS_ID);
}
#endif
}
return NULL;
}
static void spi_master_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)spi_master_task, 0, "SpiMasterTask", SPI_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, SPI_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the spi_master_entry. */
app_run(spi_master_entry);
------------------------------------------------------------------------------
#include "pinctrl.h"
#include "spi.h"
#include "soc_osal.h"
#include "app_init.h"
#include "dma.h"
#define SPI_SLAVE_NUM 1
#define SPI_FREQUENCY 2
#define SPI_CLK_POLARITY 0
#define SPI_CLK_PHASE 0
#define SPI_FRAME_FORMAT 0
#define SPI_FRAME_FORMAT_STANDARD 0
#define SPI_FRAME_SIZE 0x1f
#define SPI_TMOD 0
#define SPI_WAIT_CYCLES 0x10
#if defined(CONFIG_SPI_SUPPORT_DMA) && !(defined(CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH))
#define SPI_DMA_WIDTH 2
#endif
#define SPI_TASK_DURATION_MS 500
#define SPI_TASK_PRIO 24
#define SPI_TASK_STACK_SIZE 0x1000
static void app_spi_init_pin(void)
{
#if defined(CONFIG_PINCTRL_SUPPORT_IE)
uapi_pin_set_ie(CONFIG_SPI_SLAVE_CLK_PIN, PIN_IE_1);
uapi_pin_set_ie(CONFIG_SPI_SLAVE_CS_PIN, PIN_IE_1);
uapi_pin_set_ie(CONFIG_SPI_SLAVE_DI_PIN, PIN_IE_1);
#endif /* CONFIG_PINCTRL_SUPPORT_IE */
uapi_pin_set_mode(CONFIG_SPI_SLAVE_CLK_PIN, CONFIG_SPI_SLAVE_CLK_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_SLAVE_CS_PIN, CONFIG_SPI_SLAVE_CS_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_SLAVE_DI_PIN, CONFIG_SPI_SLAVE_DI_PIN_MODE);
uapi_pin_set_mode(CONFIG_SPI_SLAVE_DO_PIN, CONFIG_SPI_SLAVE_DO_PIN_MODE);
}
#if defined(CONFIG_SPI_SUPPORT_INTERRUPT) && (CONFIG_SPI_SUPPORT_INTERRUPT == 1)
static void app_spi_slave_write_int_handler(const void *buffer, uint32_t length)
{
unused(buffer);
unused(length);
osal_printk("spi slave write interrupt start!\r\n");
}
static void app_spi_slave_rx_callback(const void *buffer, uint32_t length, bool error)
{
if (buffer == NULL || length == 0) {
osal_printk("spi slave transfer illegal data!\r\n");
return;
}
if (error) {
osal_printk("app_spi_slave_read_int error!\r\n");
return;
}
uint8_t *buff = (uint8_t *)buffer;
for (uint32_t i = 0; i < length; i++) {
osal_printk("buff[%d] = %x\r\n", i, buff[i]);
}
osal_printk("app_spi_slave_read_int success!\r\n");
}
#endif /* CONFIG_SPI_SUPPORT_INTERRUPT */
static void app_spi_slave_init_config(void)
{
spi_attr_t config = { 0 };
spi_extra_attr_t ext_config = { 0 };
config.is_slave = true;
config.slave_num = SPI_SLAVE_NUM;
config.bus_clk = SPI_CLK_FREQ;
config.freq_mhz = SPI_FREQUENCY;
config.clk_polarity = SPI_CLK_POLARITY;
config.clk_phase = SPI_CLK_PHASE;
config.frame_format = SPI_FRAME_FORMAT;
config.spi_frame_format = HAL_SPI_FRAME_FORMAT_STANDARD;
config.frame_size = SPI_FRAME_SIZE;
config.tmod = SPI_TMOD;
config.sste = 0;
ext_config.qspi_param.wait_cycles = SPI_WAIT_CYCLES;
uapi_spi_init(CONFIG_SPI_SLAVE_BUS_ID, &config, &ext_config);
#if defined(CONFIG_SPI_SUPPORT_DMA) && (CONFIG_SPI_SUPPORT_DMA == 1)
uapi_dma_init();
uapi_dma_open();
#ifndef CONFIG_SPI_SUPPORT_POLL_AND_DMA_AUTO_SWITCH
spi_dma_config_t dma_cfg = {
.src_width = SPI_DMA_WIDTH,
.dest_width = SPI_DMA_WIDTH,
.burst_length = 0,
.priority = 0
};
if (uapi_spi_set_dma_mode(CONFIG_SPI_SLAVE_BUS_ID, true, &dma_cfg) != ERRCODE_SUCC) {
osal_printk("spi%d slave set dma mode fail!\r\n");
}
#endif
#endif /* CONFIG_SPI_SUPPORT_DMA */
#if defined(CONFIG_SPI_SUPPORT_INTERRUPT) && (CONFIG_SPI_SUPPORT_INTERRUPT == 1)
if (uapi_spi_set_irq_mode(CONFIG_SPI_SLAVE_BUS_ID, true, app_spi_slave_rx_callback,
app_spi_slave_write_int_handler) == ERRCODE_SUCC) {
osal_printk("spi%d slave set irq mode succ!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
}
#endif /* CONFIG_SPI_SUPPORT_INTERRUPT */
}
static void *spi_slave_task(const char *arg)
{
unused(arg);
/* SPI pinmux. */
app_spi_init_pin();
/* SPI slave init config. */
app_spi_slave_init_config();
/* SPI data config. */
uint8_t tx_data[CONFIG_SPI_TRANSFER_LEN] = { 0 };
for (uint32_t loop = 0; loop < CONFIG_SPI_TRANSFER_LEN; loop++) {
tx_data[loop] = (loop & 0xFF);
}
uint8_t rx_data[CONFIG_SPI_TRANSFER_LEN] = { 0 };
spi_xfer_data_t data = {
.tx_buff = tx_data,
.tx_bytes = CONFIG_SPI_TRANSFER_LEN,
.rx_buff = rx_data,
.rx_bytes = CONFIG_SPI_TRANSFER_LEN,
};
while (1) {
osal_msleep(SPI_TASK_DURATION_MS);
#ifndef CONFIG_SPI_SLAVE_SUPPORT_WRITEREAD
osal_printk("spi%d slave receive start!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
if (uapi_spi_slave_read(CONFIG_SPI_SLAVE_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
#ifndef CONFIG_SPI_SUPPORT_INTERRUPT
for (uint32_t i = 0; i < data.rx_bytes; i++) {
osal_printk("spi%d slave receive data is %x\r\n", CONFIG_SPI_SLAVE_BUS_ID, data.rx_buff[i]);
}
#endif
osal_printk("spi%d slave receive succ!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
}
osal_printk("spi%d slave send start!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
if (uapi_spi_slave_write(CONFIG_SPI_SLAVE_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
osal_printk("spi%d slave send succ!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
} else {
continue;
}
#else
osal_printk("spi%d slave writeread start!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
if (uapi_spi_slave_writeread(CONFIG_SPI_SLAVE_BUS_ID, &data, 0xFFFFFFFF) == ERRCODE_SUCC) {
for (uint32_t i = 0; i < data.rx_bytes; i++) {
osal_printk("spi%d slave writeread data is %x\r\n", CONFIG_SPI_SLAVE_BUS_ID, data.rx_buff[i]);
}
osal_printk("spi%d slave writeread succ!\r\n", CONFIG_SPI_SLAVE_BUS_ID);
}
#endif
}
return NULL;
}
static void spi_slave_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)spi_slave_task, 0, "SpiSlaveTask", SPI_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, SPI_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the spi_slave_entry. */
app_run(spi_slave_entry);
三线SPI在使用时要注意2点:
SPI的CS管脚不能配置为片选模式,而是配置为gpio模式,输出高电平:
void spi_set_pinctrl(void) { #if defined(CONFIG_PINCTRL_SUPPORT_IE) uapi_pin_set_ie(CONFIG_MOUSE_PIN_SPI_MISO, PIN_IE_1); #endif uapi_pin_set_mode(CONFIG_MOUSE_PIN_SPI_MISO, SPI_PIN_MISO_PINMUX); uapi_pin_set_mode(CONFIG_MOUSE_PIN_SPI_MOSI, SPI_PIN_MOSI_PINMUX); uapi_pin_set_mode(CONFIG_MOUSE_PIN_SPI_CLK, SPI_PIN_CLK_PINMUX); uapi_pin_set_pull(CONFIG_MOUSE_PIN_SPI_CLK, PIN_PULL_UP); uapi_pin_set_mode(CONFIG_MOUSE_PIN_SPI_CS, HAL_PIO_FUNC_GPIO); uapi_gpio_set_dir(CONFIG_MOUSE_PIN_SPI_CS, GPIO_DIRECTION_OUTPUT); uapi_gpio_set_val(CONFIG_MOUSE_PIN_SPI_CS, GPIO_LEVEL_HIGH); }
在每次调用SPI读写接口时,需手动改变CS管脚电平,使SPI在读写期间保持低电平。
以主设备写读数据为例:
errcode_t usr_spi_writeread(uint8_t *wdata, uint8_t wlen, uint8_t *rdata, uint8_t rlen) { spi_xfer_data_t spi_recv_xfer = { 0 }; spi_recv_xfer.tx_buff = wdata; /* 设置 tx buff */ spi_recv_xfer.tx_bytes = wlen; /* 设置 tx buff 长度 */ spi_recv_xfer.rx_buff = rdata; /* 设置 rx buff */ spi_recv_xfer.rx_bytes = rlen; /* 设置 rx buff 长度 */ spi_porting_set_rx_mode(TEST_SPI, rlen); /* 设置 写读接口的 rx 接收模式 */ uapi_gpio_set_val(TEST_SPI, GPIO_LEVEL_LOW); /* 设置 cs管脚为低电平 */ return uapi_spi_master_writeread(TEST_SPI, &spi_recv_xfer, 100); /* 读取数据 */ uapi_gpio_set_val(TEST_SPI, GPIO_LEVEL_HIGH); /* 设置 cs管脚为高电平 */ }
注意事项¶
当不再使用SPI时,必须调用uapi_spi_deinit进行资源释放,否则再进行初始化时将返回错误。
使用microwire帧协议时,由于microwire帧协议限制,主设备只能发送8bit位宽数据。
芯片作为主设备时,如果从设备速率较慢,主设备在每次调用读写接口后进行适当延时,避免从设备因读写数据太慢导致数据出错。
I2C¶
概述¶
IIC(Inter-Integrated Circuit)也叫做I2C,译作集成电路总线,是一种串行通信总线,使用主从架构,便于MCU与周边设备组件之间的通讯。
I2C总线包含两条线:SDA(Serial Data Line)和SCL(Serial Clock Line),其中SDA是数据线,SCL是时钟线。I2C总线上的每个设备都有一个唯一的地址,主机可以通过该地址与设备进行通信 。
提供I2C0~I2C1共2组支持Master/Slaver模式的I2C外设,I2C规格如下:
支持标速、快速以及高速三种工作模式,在串行8位双向数据传输场景下,标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下可达3.4Mbit/s。
支持位宽为32bit×8的FIFO。
支持7bit/10bit寻址模式。
功能描述¶
I2C模块提供的接口及功能如下:
uapi_i2c_master_init(i2c_bus_t bus, uint32_t baudrate, uint8_t hscode):初始化该I2C设备为主机,需要传入的参数有总线号、波特率、高速模式主机码(只有高速模式需要配置,范围0~7)(bus表示当前使用的I2C bus总线,baudrate表示I2C波特率,hscode表示I2C高速模式主机码)。(打开CONFIG_I2C_SUPPORT_MASTER宏才能使用)
uapi_i2c_master_write(i2c_bus_t bus, uint16_t dev_addr, i2c_data_t *data):I2C主机将数据发送到目标从机上(bus表示当前使用的I2C bus总线,dev_addr表示目标从机地址,data表示I2C发送的数据)。(打开CONFIG_I2C_SUPPORT_MASTER宏才能使用)
uapi_i2c_master_read(i2c_bus_t bus, uint16_t dev_addr, i2c_data_t *data):主机接收来自目标I2C从机的数据(bus表示当前使用的I2C bus总线,dev_addr表示目标从机地址,data表示I2C接收的数据)。(打开CONFIG_I2C_SUPPORT_MASTER宏才能使用)
uapi_i2c_master_writeread(i2c_bus_t bus, uint16_t dev_addr, i2c_data_t *data):主机发送数据到目标I2C从机,并接收来自此从机的数据(bus表示当前使用的I2C bus总线,dev_addr表示目标从机地址,data表示I2C数据配置)。(打开CONFIG_I2C_SUPPORT_MASTER宏才能使用)
uapi_i2c_slave_init(i2c_bus_t bus, uint32_t baudrate, uint16_t addr):初始化该I2C设备为从机,需要传入的参数有总线号、波特率、从机地址(支持7/10位地址寻址)(bus表示当前使用的I2C bus总线,baudrate表示I2C波特率,addr表示I2C作为从机工作时的从机地址)。(打开CONFIG_I2C_SUPPORT_SLAVE宏才能使用)
uapi_i2c_slave_write(i2c_bus_t bus, i2c_data_t *data):从机将数据发送给主机(bus表示当前使用的I2C bus总线,data表示I2C发送的数据)。(打开CONFIG_I2C_SUPPORT_SLAVE宏才能使用)
uapi_i2c_slave_read(i2c_bus_t bus, i2c_data_t *data):从机接收来自主机的数据(bus表示当前使用的I2C bus总线,data表示I2C接收的数据)。(打开CONFIG_I2C_SUPPORT_SLAVE宏才能使用)
uapi_i2c_deinit(i2c_bus_t bus):去初始化I2C设备,支持主从机(bus表示当前使用的I2C bus总线)。
uapi_i2c_set_baudrate(i2c_bus_t bus, uint32_t baudrate):对已初始化的I2C重置波特率,支持主从机(bus表示当前使用的I2C bus总线,baudrate表示I2C波特率)。
uapi_i2c_set_dma_mode(i2c_bus_t bus, bool en):使能/去使能DMA模式下I2C传输(bus表示当前使用的I2C bus总线,en表示是否使能DMA传输)。(打开CONFIG_I2C_SUPPORT_DMA宏才能使用)
uapi_i2c_set_irq_mode(i2c_bus_t bus, bool irq_en):设置是是否使用中断模式传输数据(bus表示当前使用的I2C bus总线,en表示是否使能中断模式传输)。(打开CONFIG_I2C_SUPPORT_INT宏才能使用)
uapi_i2c_register_irq_callback(i2c_bus_t bus, i2c_irq_callback_t callback):注册I2C中断事件回调函数(bus表示当前使用的I2C bus总线,callback表示I2C中断事件回调函数)。(打开CONFIG_I2C_SUPPORT_INT宏才能使用)
uapi_i2c_unregister_irq_callback(i2c_bus_t bus):取消注册I2C中断事件回调函数(bus表示当前使用的I2C bus总线)。(打开CONFIG_I2C_SUPPORT_INT宏才能使用)
uapi_i2c_suspend(uintptr_t arg):挂起所有I2C通道,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_I2C_SUPPORT_LPM宏才能使用)
uapi_i2c_resume(uintptr_t arg):恢复所有I2C通道,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_I2C_SUPPORT_LPM宏才能使用)
uapi_i2c_master_writeread_with_flag(i2c_bus_t bus, uint16_t dev_addr, i2c_buffer_wrap_t *write_buffer, i2c_buffer_wrap_t *read_buffer) :主机发送数据到目标I2C从机,并接收来自此从机的数据(bus表示当前使用的I2C bus总线,dev_addr表示目标从机地址,write_buffer表示I2C发送数据的信息指针,read_buffer表示I2C接收数据的信息指针)。(打开CONFIG_I2C_SUPPORT_MASTER宏才能使用)
KCONFIG配置¶



配置宏具体描述如表1所示。
表 1 I2C相关宏描述
The timeout of I2C wait condition when I2C write and read, uint is ms. |
|||||
I2C support loopback, which can read and write in one chip with two diferrent I2C buses. |
|||||
I2C支持DMA模式,视情况选择,若选择采用I2C DMA模式,则需同步选择DMA驱动的KCONFIG配置,请参考KCONFIG配置 |
|||||
I2C checks the address validity based on the protocol standard. |
|||||
I2C Max Bus num, the BS2x chip supports a maximum of 2 buses. |
该宏表示I2C BUS的最大数量,默认值是1,若使用除I2C BUS0以外的BUS,则必须对应修改该宏,否则会出现异常情况 |
开发指引¶
I2C用于对接支持I2C协议的设备,I2C单元可以作为主设备或从设备。以I2C单元作为主设备为例:
通过IO复用,将用到的管脚复用为I2C功能。
调用uapi_i2c_init接口,初始化I2C资源,此处以初始化I2C主机为例:
#define TEST_I2C I2C_BUS_0 #define I2C_BAUDRATE 400000 /* 400kHz */ #define I2C_PIN_CLK_PINMUX HAL_PIO_I2C0_CLK #define I2C_PIN_DAT_PINMUX HAL_PIO_I2C0_DATA #define I2C_PIN_CLK S_MGPIO24 #define I2C_PIN_DAT S_MGPIO25 errcode_t sample_i2c_init(void) { /* 设置 i2c pinmux */ uapi_pin_set_mode(I2C_PIN_CLK, I2C_PIN_CLK_PINMUX); /* 设置 i2c clk pinmux */ uapi_pin_set_mode(I2C_PIN_DAT, I2C_PIN_DAT_PINMUX); /* 设置 i2c dat pinmux */ /* 初始化 i2c */ return uapi_i2c_master_init(TEST_I2C, I2C_BAUDRATE, 0); /* 初始化 i2c0 */ }
调用uapi_i2c_master_write接口,实现主机发送数据。
errcode_t sample_i2c_write(uint8_t *data, uint8_t len, uint16_t addr) { i2c_data_t i2c_send_data = { 0 }; i2c_send_data.send_buf = data; /* 设置 tx buff */ i2c_send_data.send_len = len; /* 设置 tx buff 长度 */ return uapi_i2c_master_write(TEST_I2C, addr, &i2c_send_data); /* 发送数据 */ }
双板I2C三种模式(轮询模式、中断模式、DMA模式)下主从收发完整代码流程可参考以下代码:
#include "pinctrl.h"
#include "i2c.h"
#include "soc_osal.h"
#include "app_init.h"
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
#include "dma.h"
#endif
#define I2C_MASTER_ADDR 0x0
#define I2C_SLAVE_ADDR 0x8
#define I2C_SET_BAUDRATE 400000
#define I2C_TASK_DURATION_MS 500
#if defined(CONFIG_I2C_SUPPORT_INT) && (CONFIG_I2C_SUPPORT_INT == 1)
#define I2C_INT_TRANSFER_DELAY_MS 800
#endif
#define I2C_TASK_PRIO 24
#define I2C_TASK_STACK_SIZE 0x1000
static i2c_data_t data = { 0 };
static uint8_t tx_buff[CONFIG_I2C_TRANSFER_LEN] = { 0 };
static uint8_t rx_buff[CONFIG_I2C_TRANSFER_LEN] = { 0 };
static void app_i2c_init_pin(void)
{
#if defined(CONFIG_PINCTRL_SUPPORT_IE)
uapi_pin_set_ie(CONFIG_I2C_MASTER_SCL_PIN, PIN_IE_1);
uapi_pin_set_ie(CONFIG_I2C_MASTER_SDA_PIN, PIN_IE_1);
#endif /* CONFIG_PINCTRL_SUPPORT_IE */
/* I2C pinmux. */
uapi_pin_set_mode(CONFIG_I2C_MASTER_SCL_PIN, CONFIG_I2C_MASTER_SCL_PIN_MODE);
uapi_pin_set_mode(CONFIG_I2C_MASTER_SDA_PIN, CONFIG_I2C_MASTER_SDA_PIN_MODE);
}
static void app_i2c_data_config(void)
{
/* I2C data config. */
for (uint32_t loop = 0; loop < CONFIG_I2C_TRANSFER_LEN; loop++) {
tx_buff[loop] = (loop & 0xFF);
}
data.send_buf = tx_buff;
data.send_len = CONFIG_I2C_TRANSFER_LEN;
data.receive_buf = rx_buff;
data.receive_len = CONFIG_I2C_TRANSFER_LEN;
}
static void *i2c_master_task(const char *arg)
{
unused(arg);
uint32_t baudrate = I2C_SET_BAUDRATE;
uint8_t hscode = I2C_MASTER_ADDR;
uint16_t dev_addr = I2C_SLAVE_ADDR;
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
uapi_dma_init();
uapi_dma_open();
#ifndef CONFIG_I2C_SUPPORT_POLL_AND_DMA_AUTO_SWITCH
uapi_i2c_set_dma_mode(CONFIG_I2C_MASTER_BUS_ID, true);
#endif
#endif /* CONFIG_I2C_SUPPORT_DMA */
/* I2C master init config. */
app_i2c_init_pin();
uapi_i2c_master_init(CONFIG_I2C_MASTER_BUS_ID, baudrate, hscode);
#if defined(CONFIG_I2C_SUPPORT_INT) && (CONFIG_I2C_SUPPORT_INT == 1)
uapi_i2c_set_irq_mode(CONFIG_I2C_MASTER_BUS_ID, true);
#endif /* CONFIG_I2C_SUPPORT_INT */
app_i2c_data_config();
while (1) {
osal_msleep(I2C_TASK_DURATION_MS);
#ifndef CONFIG_I2C_MASTER_SUPPORT_WRITEREAD
osal_printk("i2c%d master send start!\r\n", CONFIG_I2C_MASTER_BUS_ID);
if (uapi_i2c_master_write(CONFIG_I2C_MASTER_BUS_ID, dev_addr, &data) == ERRCODE_SUCC) {
osal_printk("i2c%d master send succ!\r\n", CONFIG_I2C_MASTER_BUS_ID);
} else {
continue;
}
#if defined(CONFIG_I2C_SUPPORT_INT) && (CONFIG_I2C_SUPPORT_INT == 1)
osal_msleep(I2C_INT_TRANSFER_DELAY_MS);
#endif
osal_printk("i2c%d master receive start!\r\n", CONFIG_I2C_MASTER_BUS_ID);
if (uapi_i2c_master_read(CONFIG_I2C_MASTER_BUS_ID, dev_addr, &data) == ERRCODE_SUCC) {
for (uint32_t i = 0; i < data.receive_len; i++) {
osal_printk("i2c%d master receive data is %x\r\n", CONFIG_I2C_MASTER_BUS_ID, data.receive_buf[i]);
}
osal_printk("i2c%d master receive succ!\r\n", CONFIG_I2C_MASTER_BUS_ID);
}
#else
osal_printk("i2c%d master writeread start!\r\n", CONFIG_I2C_MASTER_BUS_ID);
if (uapi_i2c_master_writeread(CONFIG_I2C_MASTER_BUS_ID, dev_addr, &data) == ERRCODE_SUCC) {
for (uint32_t i = 0; i < data.receive_len; i++) {
osal_printk("i2c%d master writeread data is %x\r\n", CONFIG_I2C_MASTER_BUS_ID, data.receive_buf[i]);
}
osal_printk("i2c%d master writeread succ!\r\n", CONFIG_I2C_MASTER_BUS_ID);
}
#endif
}
return NULL;
}
static void i2c_master_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2c_master_task, 0, "I2cMasterTask", I2C_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2C_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2c_master_entry. */
app_run(i2c_master_entry);
----------------------------------------------------------------
#include "pinctrl.h"
#include "i2c.h"
#include "soc_osal.h"
#include "app_init.h"
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
#include "dma.h"
#endif
#define I2C_SLAVE_ADDR 0x8
#define I2C_SET_BAUDRATE 500000
#define I2C_TASK_DURATION_MS 100
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
#define I2C_DMA_TRANSFER_DELAY_MS 500
#endif
#define I2C_TASK_PRIO 24
#define I2C_TASK_STACK_SIZE 0x1000
static void app_i2c_init_pin(void)
{
#if defined(CONFIG_PINCTRL_SUPPORT_IE)
uapi_pin_set_ie(CONFIG_I2C_SLAVE_SCL_PIN, PIN_IE_1);
uapi_pin_set_ie(CONFIG_I2C_SLAVE_SDA_PIN, PIN_IE_1);
#endif /* CONFIG_PINCTRL_SUPPORT_IE */
/* I2C pinmux. */
uapi_pin_set_mode(CONFIG_I2C_SLAVE_SCL_PIN, CONFIG_I2C_SLAVE_SCL_PIN_MODE);
uapi_pin_set_mode(CONFIG_I2C_SLAVE_SDA_PIN, CONFIG_I2C_SLAVE_SDA_PIN_MODE);
}
void *i2c_slave_task(const char *arg)
{
unused(arg);
i2c_data_t data = { 0 };
uint32_t baudrate = I2C_SET_BAUDRATE;
uint16_t dev_addr = I2C_SLAVE_ADDR;
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
uapi_dma_init();
uapi_dma_open();
#ifndef CONFIG_I2C_SUPPORT_POLL_AND_DMA_AUTO_SWITCH
uapi_i2c_set_dma_mode(CONFIG_I2C_SLAVE_BUS_ID, true);
#endif
#endif /* CONFIG_I2C_SUPPORT_DMA */
/* I2C slave init config. */
app_i2c_init_pin();
uapi_i2c_slave_init(CONFIG_I2C_SLAVE_BUS_ID, baudrate, dev_addr);
#if defined(CONFIG_I2C_SUPPORT_INT) && (CONFIG_I2C_SUPPORT_INT == 1)
uapi_i2c_set_irq_mode(CONFIG_I2C_SLAVE_BUS_ID, true);
#endif /* CONFIG_I2C_SUPPORT_INT */
/* I2C data config. */
uint8_t tx_buff[CONFIG_I2C_TRANSFER_LEN] = { 0 };
for (uint32_t loop = 0; loop < CONFIG_I2C_TRANSFER_LEN; loop++) {
tx_buff[loop] = (loop & 0xFF);
}
uint8_t rx_buff[CONFIG_I2C_TRANSFER_LEN] = { 0 };
data.send_buf = tx_buff;
data.send_len = CONFIG_I2C_TRANSFER_LEN;
data.receive_buf = rx_buff;
data.receive_len = CONFIG_I2C_TRANSFER_LEN;
while (1) {
osal_msleep(I2C_TASK_DURATION_MS);
osal_printk("i2c%d slave receive start!\r\n", CONFIG_I2C_SLAVE_BUS_ID);
if (uapi_i2c_slave_read(CONFIG_I2C_SLAVE_BUS_ID, &data) == ERRCODE_SUCC) {
for (uint32_t i = 0; i < data.receive_len; i++) {
osal_printk("i2c slave receive data is %x\r\n", data.receive_buf[i]);
}
osal_printk("i2c%d slave receive succ!\r\n", CONFIG_I2C_SLAVE_BUS_ID);
} else {
continue;
}
osal_printk("i2c%d slave send start!\r\n", CONFIG_I2C_SLAVE_BUS_ID);
#if defined(CONFIG_I2C_SUPPORT_DMA) && (CONFIG_I2C_SUPPORT_DMA == 1)
osal_msleep(I2C_DMA_TRANSFER_DELAY_MS);
#endif
if (uapi_i2c_slave_write(CONFIG_I2C_SLAVE_BUS_ID, &data) == ERRCODE_SUCC) {
osal_printk("i2c%d slave send succ!\r\n", CONFIG_I2C_SLAVE_BUS_ID);
}
}
return NULL;
}
static void i2c_slave_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2c_slave_task, 0, "I2cSlaveTask", I2C_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2C_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2c_slave_entry. */
app_run(i2c_slave_entry);
注意事项¶
函数uapi_i2c_set_baudrate需要先初始化,再调用,方便修改波特率。如果I2C未经过初始化,直接调用uapi_i2c_set_baudrate函数,会返回错误码ERRCODE_I2C_NOT_INIT。
需要主动确保数据发送指针send_buf和数据接收指针receive_buf不可传入空指针。
当发送的数据大于对接设备的可接受范围时,会发送失败;如果发送数据失败,再切换另一个I2C设备继续发送时,会造成总线挂死,所有I2C设备都无法正确发送数据。
uapi_i2c_master_init不能多次初始化,使用完成后需要调用uapi_i2c_deinit进行去初始化。
ADC¶
概述¶
ADC(Analog-to-Digital Converter)模/数转换器,是指将连续变化的模拟信号转换为离散的数位信号的器件。
真实世界的模拟信号,例如温度、压力、声音或者图像等,需要转换成更容易储存、处理和发送的数字信号,模/数转换器可以实现这个功能,可应用于电量检测、按键检测等。
提供GAFE(General Analog Front End)、AAFE(Audio Analog Front End)两种模式开发者选择:
GAFE:8通道 13bit 1.6Msps SAR ADC,提供过采样和buf功能,用于Tag-ID、Battery电压测量、NTC温度测量等低频单端/差分量测场景。
AAFE:40dB前级放大,复用SAR ADC,数据域降采样到16ksps或32ksps,适用于模拟麦克风采样场景。
功能描述¶
ADC模块提供的接口及功能如下:
uapi_adc_init(adc_clock_t clock):初始化ADC模块(clock表示ADC采样的时钟)。
uapi_adc_deinit(void):去初始化ADC。
uapi_adc_power_en(afe_scan_mode_t afe_scan_mode, bool en):上下电并启用或关闭ADC(afe_scan_mode表示需要使用的AFE精度模式,en表示上电或下电状态)。
uapi_adc_is_using(void):检查ADC是否正在使用。
adc_calibration:ADC校准,包含4步校准。
uapi_adc_open_channel(uint8_t channel):开启一个ADC通道(适用于所有Channel)(channel表示需要开启的ADC通道)。
uapi_adc_close_channel(uint8_t channel):关闭一个ADC通道(适用于所有Channel)(channel表示需要关闭的ADC通道)。
uapi_adc_open_differential_channel(uint8_t postive_ch, uint8_t negative_ch):开启差分ADC通道(适用于GADC_CHANNEL_6与GADC_CHANNEL_7)(postive_ch表示ADC正极通道,negative_ch表示ADC负极通道)。(打开CONFIG_ADC_SUPPORT_DIFFERENTIAL宏才能使用)
uapi_adc_close_differential_channel(uint8_t postive_ch, uint8_t negative_ch):关闭差分ADC通道(适用于GADC_CHANNEL_6与GADC_CHANNEL_7)(postive_ch表示ADC正极通道,negative_ch表示ADC负极通道)。(打开CONFIG_ADC_SUPPORT_DIFFERENTIAL宏才能使用)
uapi_adc_auto_sample(uint8_t channel):ADC采样接口,上报值为与参考电压的码字值(32位有符号数),需要按公式转换为电压值(channel表示ADC通道)。(打开CONFIG_ADC_SUPPORT_AFE宏才能使用)
adc_port_gadc_entirely_open(adc_channel_t channel, bool self_cali):包含初始化一个GADC通道的全部流程,self_cali参数表示本次初始化是否要校准ADC,如校准则需要花费约170ms,如已存储校准值,则可以传入false。
adc_port_gadc_entirely_sample(adc_channel_t channel):包含采样一个GADC通道的全部流程,返回值是转换为mV的电压值。
adc_port_gadc_entirely_close(adc_channel_t channel):包含关闭GADC通道的全部流程,会记录下当前的校准值。
KCONFIG配置¶
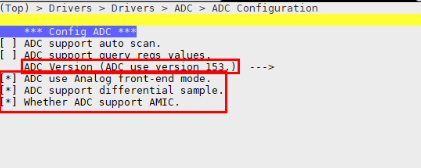
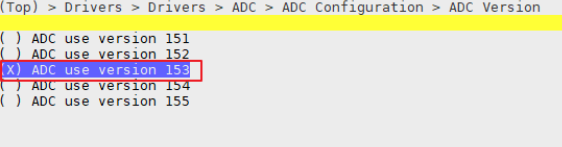
配置宏具体描述如表1所示。
表 1 ADC相关宏描述
开发指引¶
可配置项主要在ADC对应的porting层头文件中,下文将介绍重要可配置项的功能。
GAFE:
cfg_adc_data0.b.data_num:计数模式下采样点数为2x个。
cfg_adc_data0.b.wait_num:等待数据链路稳定抛弃的采样值数目。
cfg_adc_data1.b.osr_len:过采样累加样点数。
cfg_adc_data1.b.osr_sel:过采样平均样数,和累加样点数配置为相同值,上报值为(data1+data2+...+data_osr_len)/osr_sel。
如果想要减短GADC采样时间,可以减少上述四个变量的值,此处给出一组极限值:
.cfg_adc_data0.b.data_num = 0xa,
.cfg_adc_data0.b.wait_num = 4,
.cfg_adc_data1.b.osr_len= 2,
.cfg_adc_data1.b.osr_sel= 2,
AAFE:
.pga_gain:AAFE电路前极放大器PGA增益倍数。
示例:
GAFE使能:
static void test_afe_set_io(uint8_t channel)
{
pin_t adc_pin[] = {S_MGPIO2, S_MGPIO3, S_MGPIO4, S_MGPIO5, S_MGPIO28, S_MGPIO29, S_MGPIO30, S_MGPIO31};
uapi_pin_set_mode(adc_pin[channel], PIN_MODE_0);
uapi_gpio_set_dir(adc_pin[channel], GPIO_DIRECTION_INPUT);
uapi_pin_set_pull(adc_pin[channel], PIN_PULL_NONE);
uapi_pin_set_ie(adc_pin[channel], PIN_IE_1);
}
int gadc_open_demo(void)
{
) uint8_t channel = GADC_CHANNEL_0;
if (channel >= ADC_CHANNEL_MAX_NUM) {
return ERROR_BAD_PARAMS;
}
test_afe_set_io(channel);
uapi_adc_init(ADC_CLOCK_NONE);
uapi_adc_power_en(AFE_GADC_MODE, true);
uapi_adc_open_channel(channel);
adc_calibration(AFE_GADC_MODE, true, true, true);
return TEST_OK;
}
GAFE采样:
#define ADC_AUTO_SAMPLE_TEST_TIMES 10
int adc_auto_sample_demo(void)
{
adc_v153_gadc_channel_sel_t channel = GADC_CHANNEL_1; // 采样时选择希望采样的channel
uapi_adc_open_channel(channel);
int adc_value = 0;
for (int i = 0; i < ADC_AUTO_SAMPLE_TEST_TIMES; i++) {
adc_value = adc_port_gadc_entirely_sample(channel);
test_suite_log_stringf("adc:%dmV%x\n", adc_value);
}
return TEST_OK;
}
GAFE通道切换采样:
int adc_auto_sample_demo(void)
{
adc_v153_gadc_channel_sel_t channel = GADC_CHANNEL_1; // 采样时选择希望采样的channel
int adc_value = 0;
for (int i = 0; i < ADC_AUTO_SAMPLE_TEST_TIMES; i++) {
adc_value = adc_port_gadc_entirely_sample(channel);
test_suite_log_stringf("adc: %dmV%x\n", adc_value);
}
channel = GADC_CHANNEL_3; // 切换到下一个需要采样的channel
for (int i = 0; i < ADC_AUTO_SAMPLE_TEST_TIMES; i++) {
adc_value = adc_port_gadc_entirely_sample(channel);
test_suite_log_stringf("adc: %dmV%x\n", adc_value);
}
return TEST_OK;
}
GAFE entire接口使用:
void adc_entire_demo(void) {
uint8_t gadc_channel1 = GADC_CHANNEL_0;
uint8_t gadc_channel2 = GADC_CHANNEL_5;
int adc_value = 0;
adc_port_gadc_entirely_open(gadc_channel1,true); // ADC第一次开启,传入true表示本次校准.
adc_value = adc_port_gadc_entirely_sample(gadc_channel1);
osal_printk("gadc: %dmv\n", adc_value );
adc_port_gadc_entirely_close(gadc_channel1); //close时会记录校准值
adc_port_gadc_entirely_open(gadc_channel1, false); // False表示本次开启使用记录好的校准值.
adc_value = adc_port_gadc_entirely_sample(gadc_channel2);
osal_printk("gadc_channel2: %dmv\n", adc_value);
adc_port_gadc_entirely_close(gadc_channel2);
}
AAFE使能&采样:
int amic_open_demo(void)
{
test_afe_set_io(AMIC_CHANNEL_0);
test_afe_set_io(AMIC_CHANNEL_1);
uapi_adc_init(ADC_CLOCK_NONE);
uapi_adc_power_en(AFE_AMIC_MODE, true);
uapi_adc_open_differential_channel(AMIC_CHANNEL_0, AMIC_CHANNEL_1);
adc_calibration(AFE_AMIC_MODE, true, true, true);
uapi_adc_auto_sample(AMIC_CHANNEL_0); // 开启采样后数据需要被音频驱动搬走
return TEST_OK;
}
注意事项¶
GAFE模拟输入电压范围。
受限于数模复用的GPIO供电电压,ADC参考电压为1.5V,故八个端口只能输入0~1.5V电压,禁止输入1.5V以上电压。更高电压建议片外电阻分压到1.5V以内再接到GAFE输入。分压电路设计请与硬件工程师沟通后再投板。增加分压电路后,可能因存在电容导致引入充放电时间,需要实测确定。
AAFE采集音频信号处理方法。
通过uapi_adc_auto_sample采集到的音频信号与GAFE采集到的电量信号格式相同,包含13bit有效位及1bit符号位,处理完的值通过PDM模块发送,具体实现参考“开发指引”章节。
推荐使用带entirely的三个接口,较为简洁。上电后第一次初始化时校准即可。
DMA¶
概述¶
DMA(Directory Memory Access)直接存储器访问是一种完全由硬件执行数据交换的工作方式。在这种方式中,直接存储器访问控制器DMAC(Directory Memory Access Controller)直接在存储器和外设、外设和外设、存储器和存储器之间进行数据传输,减少处理器的干涉和开销。
DMA方式一般用于高速传输成组的数据。DMAC在收到DMA传输请求后根据CPU对通道的配置启动总线主控制器,向存储器和外设发出地址和控制信号,对传输数据的个数计数,并以中断方式向CPU报告传输操作的结束或错误。
提供的DMA规格如下:
支持存储器到存储器、存储器到外设、外设到存储器、外设到外设传输类型。
MCU侧DMA支持8个通道,16个硬件握手接口,且通道参数优先级可配置。
所有通道支持单个包长度最大4095Byte数据,4K数据需要在同一个sector内。
支持大小端可配置。
功能描述¶
DMA模块提供的接口及功能如下:
uapi_dma_init(void):初始化DMA。
uapi_dma_deinit(void):去初始化DMA。
uapi_dma_open(void):打开DMA。
uapi_dma_close(void):关闭DMA。
uapi_dma_start_transfer(uint8_t channel):启动指定通道的DMA传输(channel表示需要开启的DMA通道数)。
uapi_dma_end_transfer(uint8_t channel):停止指定通道的DMA传输(channel表示需要停止的DMA通道数)。
uapi_dma_get_block_ts(uint8_t channel):获取DMA传输的数据量(channel表示DMA通道数)。
uapi_dma_transfer_memory_single(const dma_ch_user_memory_config_t *user_cfg, dma_transfer_cb_t callback, uintptr_t arg):通过DMA通道传输类型为内存到内存的数据(user_cfg表示DMA通道传输配置,callback表示通道传输完成回调函数,arg表示传输完成时回传给回调函数的参数)。
uapi_dma_configure_peripheral_transfer_single(const dma_ch_user_peripheral_config_t *user_cfg, uint8_t *channel, dma_transfer_cb_t callback, uintptr_t arg):通过DMA通道传输类型为内存到外设或外设到内存的数据(user_cfg表示DMA通道传输配置,channel表示被选择的DMA通道数,callback表示通道传输完成回调函数,arg表示传输完成时回传给回调函数的参数)。
uapi_dma_get_lli_channel(uint8_t burst_length, uint8_t handshaking):获取DMA链表传输通道(burst_length表示DMA的burst传输长度,handshaking表示DMA传输外设种类)。(打开CONFIG_DMA_SUPPORT_LLI宏才能使用)
uapi_dma_transfer_memory_lli(uint8_t channel, const dma_ch_user_memory_config_t *user_cfg, dma_transfer_cb_t callback):通过DMA通道以链表模式传输类型为内存到内存的数据(channel表示DMA通道数,user_cfg表示DMA通道传输配置,callback表示通道传输完成回调函数)。(打开CONFIG_DMA_SUPPORT_LLI宏才能使用)
uapi_dma_configure_peripheral_transfer_lli(uint8_t channel, const dma_ch_user_peripheral_config_t *user_cfg, dma_transfer_cb_t callback):通过DMA通道以链表模式传输类型为内存到外设或外设到内存的数据channel表示DMA通道数,user_cfg表示DMA通道传输配置,callback表示通道传输完成回调函数)。(打开CONFIG_DMA_SUPPORT_LLI宏才能使用)
uapi_dma_enbale_lli(uint8_t channel, dma_transfer_cb_t callback, uintptr_t arg):启用DMA链表传输(channel表示DMA通道数,callback表示通道传输完成回调函数,arg表示传输完成时回传给回调函数的参数)。
(打开CONFIG_DMA_SUPPORT_LLI宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 DMA相关宏描述
开发指引¶
DMA接口仅对外提供存储器到存储器的拷贝功能(其他拷贝方式可参考本文档内对应外设驱动开发指引),操作步骤如下:
调用uapi_dma_init接口,初始化DMA模块。
调用uapi_dma_open接口,打开DMA通道。
调用uapi_dma_transfer接口,DMA开始传输,通过参数block可以设置是否为阻塞模式。
示例:
#include "dma.h"
#include "hal_dma.h"
/* 传输完成后回调函数处理 */
static bool g_dma_trans_done;
static bool g_dma_trans_succ;
void test_dma_trans_done_callback(uint8_t intr, uint8_t channel, uintptr_t arg)
{
unused(channel);
unused(arg);
switch (intr) {
case HAL_DMA_INTERRUPT_TFR:
g_dma_trans_done = true;
g_dma_trans_succ = true;
break;
case HAL_DMA_INTERRUPT_BLOCK:
g_dma_trans_done = true;
g_dma_trans_succ = true;
break;
case HAL_DMA_INTERRUPT_ERR:
g_dma_trans_done = true;
g_dma_trans_succ = false;
break;
default:
break;
}
osal_printk("[DMA] int_type is %d. \r\n", intr);
}
static void test_fill_test_buffer(void *data, unsigned int length)
{
for (unsigned int i = 0; i < length; i++) {
*((unsigned char *)data + i) = (unsigned char)i;
}
}
static void test_clear_test_buffer(void *data, unsigned int length)
{
memset_s(data, length, 0, length);
}
errcode_t test_dma_mem_to_mem_single(void)
{
dma_ch_user_memory_config_t transfer_config;
/* 填充源地址要发送的数据 */
test_fill_test_buffer((void *)(uintptr_t)g_dma_src_data, sizeof(g_dma_src_data));
/* 清空目的地址的数据 */
test_clear_test_buffer((void *)(uintptr_t)g_dma_desc_data, sizeof(g_dma_desc_data));
/* 初始化DMA */
uapi_dma_init();
/* 开启DMA模块 */
uapi_dma_open();
/* 源地址 */
transfer_config.src = ((uint32_t)(uintptr_t)g_dma_src_data);
/* 目的地址 */
transfer_config.dest = ((uint32_t)(uintptr_t)g_dma_desc_data);
/* 传输数目 */
transfer_config.transfer_num = 100;
/* 优先级0-3, 0最低 */
transfer_config.priority = 0;
/* 传输宽度 0:1字节 1:2字节 2:4字节 */
transfer_config.width = 0;
/* 调用接口按块发送函数,并注册回调函数 */
if (uapi_dma_transfer_memory_single(&transfer_config, test_dma_trans_done_callback, 0) != ERRCODE_SUCC) {
return ERRCODE_FAIL;
}
/* 等待发送完成 */
while (!g_dma_trans_done) { }
if (!g_dma_trans_succ) {
return ERRCODE_FAIL;
}
return ERRCODE_SUCC;
}
DMA完整代码流程可参考以下代码:
#include "hal_dma.h"
#include "soc_osal.h"
#include "securec.h"
#include "app_init.h"
#include "dma.h"
#define DMA_TRANSFER_WORD_NUM 32
#define DMA_TRANSFER_PRIORITY 0
#define DMA_TRANSFER_WIDTH 2
#define DMA_TASK_DURATION_MS 500
#define DMA_TASK_PRIO 24
#define DMA_TASK_STACK_SIZE 0x1000
static uint32_t g_app_dma_src_data[DMA_TRANSFER_WORD_NUM] = { 0 };
static uint32_t g_app_dma_desc_data[DMA_TRANSFER_WORD_NUM] = { 0 };
static uint8_t g_dma_trans_done = 0;
static void app_dma_trans_done_callback(uint8_t int_type, uint8_t channel, uintptr_t arg)
{
unused(arg);
unused(channel);
switch (int_type) {
case HAL_DMA_INTERRUPT_TFR:
g_dma_trans_done = 1;
break;
case HAL_DMA_INTERRUPT_BLOCK:
g_dma_trans_done = 1;
break;
case HAL_DMA_INTERRUPT_ERR:
osal_printk("DMA transfer error.\r\n");
break;
default:
break;
}
}
static void *dma_task(const char *arg)
{
unused(arg);
/* DMA init. */
uapi_dma_deinit();
uapi_dma_init();
uapi_dma_open();
#if defined(CONFIG_DMA_MEMORY_LLI_TRANSFER_MODE)
dma_channel_t dma_channel = DMA_CHANNEL_NONE;
/* The following two input parameters need to be adapted according to the actual situation when using SMDMA. */
dma_channel = uapi_dma_get_lli_channel(0, HAL_DMA_HANDSHAKING_MAX_NUM);
#endif
for (uint32_t i = 0; i < DMA_TRANSFER_WORD_NUM; i++) {
g_app_dma_src_data[i] = i;
}
memset_s(g_app_dma_desc_data, DMA_TRANSFER_WORD_NUM, 0, DMA_TRANSFER_WORD_NUM);
dma_ch_user_memory_config_t transfer_config = { 0 };
transfer_config.src = (uint32_t)(uintptr_t)g_app_dma_src_data;
transfer_config.dest = (uint32_t)(uintptr_t)g_app_dma_desc_data;
transfer_config.transfer_num = DMA_TRANSFER_WORD_NUM;
transfer_config.priority = DMA_TRANSFER_PRIORITY;
transfer_config.width = DMA_TRANSFER_WIDTH;
while (1) {
osal_msleep(DMA_TASK_DURATION_MS);
g_dma_trans_done = 0;
#if defined(CONFIG_DMA_MEMORY_LLI_TRANSFER_MODE)
/* 此处链表只配置了一个结点且执行的是内存到内存之间的搬运,外设到内存搬运的接口使用请参考其他驱动示例代码 */
osal_printk("dma config link list item of memory to memory start!\r\n");
if (uapi_dma_transfer_memory_lli(dma_channel, &transfer_config, app_dma_trans_done_callback) == ERRCODE_SUCC) {
osal_printk("dma config link list item of memory to memory succ!\r\n");
}
osal_printk("dma enable lli memory transfer start!\r\n");
if (uapi_dma_enable_lli(dma_channel, app_dma_trans_done_callback, (uintptr_t)NULL) == ERRCODE_SUCC) {
osal_printk("dma enable lli memory transfer succ!\r\n");
}
while (!g_dma_trans_done) {}
if (uapi_dma_end_transfer(dma_channel) == ERRCODE_SUCC) {
osal_printk("dma channel transfer finish!\r\n");
}
#else
osal_printk("dma single memory transfer start!\r\n");
if (uapi_dma_transfer_memory_single(&transfer_config, app_dma_trans_done_callback,
(uintptr_t)NULL) == ERRCODE_SUCC) {
osal_printk("dma single memory transfer succ!\r\n");
}
while (!g_dma_trans_done) {}
osal_printk("dma checking transfer from 0x%08x to 0x%08x...\r\n", transfer_config.src, transfer_config.dest);
if (memcmp((void *)transfer_config.src, (void *)transfer_config.dest, transfer_config.transfer_num) == 0) {
osal_printk("dma memory copy test succ, length = %d block\r\n", transfer_config.transfer_num);
}
#endif
}
return NULL;
}
static void dma_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)dma_task, 0, "DmaTask", DMA_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, DMA_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the dma_entry. */
app_run(dma_entry);
注意事项¶
建议仅在需要非阻塞进行数据拷贝的场景下使用DMA,此时可让出CPU,传输完成之后CPU会上报中断,可以在回调函数中根据事件类型判断传输成功与失败。传输阻塞场景下,仍建议使用memcpy_s进行数据拷贝。
DMA的IDLE中断不会在FIFO为空的时候触发,只有在FIFO有数且一段时间未到达水线时触发,故水线设为1字节时也不会触发IDLE中断。
PWM¶
概述¶
PWM(Pulse Width Modulation)脉宽调制模块通过对一系列脉冲的宽度进行调制,等效出所需波形。即对模拟信号电平进行数字编码,通过调节频率、占空比的变化来调节信号的变化。
PWM规格如下:
支持12路PWM输出,寄存器单独可配置。
支持PWM分组,一个组可以分配多个通道,同一个通道不能同时位于不同的组里。
支持0电平宽度和1电平宽度可调。
支持固定周期数发送模式。
支持发送完成中断,支持中断清除和中断查询。
仅支持低16bit的相位控制计数、频率控制计数以及占空比计数。
功能描述¶
PWM模块提供的接口及功能如下:
uapi_pwm_init(void):初始化PWM。
uapi_pwm_deinit(void):去初始化PWM。
uapi_pwm_open(uint8_t channel, const pwm_config_t *cfg):打开PWM通道(channel表示PWM通道数,cfg表示PWM设备的配置信息)。
uapi_pwm_close(uint8_t channel):关闭PWM通道(channel表示PWM通道数)。
uapi_pwm_get_frequency(uint8_t channel):获取PWM工作频率(channel表示PWM通道数)。
uapi_pwm_start(uint8_t channel):启动PWM信号输出(channel表示PWM通道数)。
uapi_pwm_isr(uint8_t channel):PWM中断服务例程(channel表示PWM通道数)。
uapi_pwm_register_interrupt(uint8_t channel, pwm_callback_t callback):为PWM注册中断回调(channel表示PWM通道数,callback表示PWM通道传输完成的回调函数)。
uapi_pwm_unregister_interrupt(uint8_t channel):去PWM注册中断回调(channel表示PWM通道数)。
uapi_pwm_set_group(uint8_t group, const uint8_t *channel_set, uint32_t channel_set_len):为PWM通道分组(group表示PWM组数,channel_set表示进行分组设置的通道集合,channel_set_len表示进行分组设置的通道集合长度)。(打开CONFIG_PWM_USING_V151宏才能使用)
uapi_pwm_clear_group(uint8_t group):清理PWM通道分组(group表示PWM组数)。(打开CONFIG_PWM_USING_V151宏才能使用)
uapi_pwm_start_group(uint8_t group):启动指定分组的PWM(group表示PWM组数)。(打开CONFIG_PWM_USING_V151宏才能使用)
uapi_pwm_stop_group(uint8_t group):停止指定分组的PWM(group表示PWM组数)。(打开CONFIG_PWM_USING_V151宏才能使用)
uapi_pwm_update_cfg(uint8_t channel, const pwm_config_t *cfg):更新指定PWM通道的配置(channel表示PWM通道数,cfg表示PWM设备的配置信息)。(打开CONFIG_PWM_USING_V151宏才能使用)
uapi_pwm_config_preload(uint8_t group, uint8_t channel, const pwm_config_t *cfg):PWM预配置,当上一个PWM配置完成时,此配置会自动加载(group表示PWM组数,channel表示PWM通道数,cfg表示PWM设备的配置信息)。(打开CONFIG_PWM_USING_V151以及CONFIG_PWM_PRELOAD宏才能使用)
uapi_pwm_suspend(uintptr_t arg):挂起所有PWM通道,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_PWM_SUPPORT_LPM宏才能使用)
uapi_pwm_resume(uintptr_t arg):恢复所有PWM通道,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_PWM_SUPPORT_LPM宏才能使用)
KCONFIG配置¶
配置宏具体描述如表1所示。
表 1 PWM相关宏描述
开发指引¶
PWM利用微处理器的数字输出对模拟电路进行控制,操作步骤如下:
调用uapi_pin_set_mode接口,将IO复用为PWM功能。
调用uapi_pwm_init对PWM进行初始化。
调用uapi_pwm_set_group对PWM进行分组设置。
调用uapi_pwm_open,配置PWM参数,打开指定通道。
调用uapi_pwm_register_interrupt接口,注册PWM中断的回调函数。
调用uapi_pwm_start或者uapi_pwm_start_group接口,开启指定ID或者指定分组的PWM信号输出。
调用uapi_pwm_stop_group接口,停止指定分组的PWM信号输出。
调用uapi_pwm_close接口,关闭指定ID的PWM信号输出。
调用uapi_pwm_deinit接口,去初始化PWM模块。
示例:
#include "pwm.h"
#include "pwm_porting.h"
#define TEST_MAX_TIMES 10
#define TEST_DELAY_MS 1000
#define GROUP_ID 0
/* PWM注册中断回调函数 */
static errcode_t pwm_test_callback(pwm_channel_t channel)
{
osal_printk("PWM channel number is %d, func of interrupt start. \r\n", channel);
uapi_pwm_isr(channel);
return ERRCODE_SUCC;
}
void test_pwm_sample(pin_t pin, pin_mode_t mode, pwm_channel_t channel)
{
/* 设置循环次数 */
unsigned int test_times;
/* 配置 low_time、high_time、cycles, repeat. 当repeat为true时候,cycles无效 */
/* offset_time 未使用到配置为0 */
pwm_config_t cfg_repeat = { 100, 100, 0, 0, true };
/* 设置可作为PWM IO的模式 */
uapi_pin_set_mode(pin, mode);
uapi_pwm_init();
uint8_t channel_id = channel;
uapi_pwm_set_group(GROUP_ID, channel_id, 1);
/* 打开指定channel的PWM */
uapi_pwm_open(channel, &cfg_repeat);
/* 注册回调函数 */
uapi_pwm_register_interrupt(channel, pwm_test_callback);
/* 启动指定channel pwm输出 */
uapi_pwm_start(channel);
/* 当前设置为循环输出,循环TEST_MAX_TIMES次,每次delay TEST_DELAY_MS,后关闭pwm输出 */
for (test_times = 0; test_times <= TEST_MAX_TIMES; test_times++) {
if (test_times == TEST_MAX_TIMES) {
uapi_pwm_stop_group(GROUP_ID);
uapi_pwm_close(channel);
osal_printk("now close the pwm output and trigger interrupt \r\n");
}
osal_mdelay(TEST_DELAY_MS);
}
uapi_pwm_deinit();
return;
}
PWM 完整代码流程可参考以下代码:
#if defined(CONFIG_PWM_SUPPORT_LPM)
#include "pm_veto.h"
#endif
#include "common_def.h"
#include "pinctrl.h"
#include "pwm.h"
#include "tcxo.h"
#include "soc_osal.h"
#include "app_init.h"
#define TEST_TCXO_DELAY_500MS 500
#define PWM_LOW_TIME_CYC 0
#define PWM_HIGH_TIME_CYC 20
#define PWM_TASK_PRIO 24
#define PWM_TASK_STACK_SIZE 0x1000
static uint32_t g_pwm_cyc_done_cnt = 0;
static errcode_t pwm_sample_callback(uint8_t channel)
{
unused(channel);
g_pwm_cyc_done_cnt++;
return ERRCODE_SUCC;
}
void pwm_repeat_mode(void)
{
pwm_config_t cfg_repeat = {
PWM_LOW_TIME_CYC,
PWM_HIGH_TIME_CYC,
0,
0xFF,
true
};
uapi_pwm_init();
uapi_pwm_open(CONFIG_PWM_CHANNEL, &cfg_repeat);
uapi_pwm_register_interrupt(CONFIG_PWM_CHANNEL, pwm_sample_callback);
#if defined(CONFIG_PWM_SUPPORT_LPM)
/* veto sleep, or pwm will stop after sleep */
uapi_pm_add_sleep_veto(PM_USER0_VETO_ID);
#endif
#ifdef CONFIG_PWM_USING_V151
uint8_t channel_id = CONFIG_PWM_CHANNEL;
uapi_pwm_set_group(CONFIG_PWM_GROUP_ID, &channel_id, 1);
uapi_pwm_start_group(CONFIG_PWM_GROUP_ID);
#else
uapi_pwm_start(CONFIG_PWM_CHANNEL);
#endif
uapi_tcxo_delay_ms((uint32_t)TEST_TCXO_DELAY_500MS);
#ifdef CONFIG_PWM_USING_V151
/* update duty ratio config */
while (cfg_repeat.low_time <= PWM_HIGH_TIME_CYC) {
uapi_pwm_update_cfg(CONFIG_PWM_CHANNEL, &cfg_repeat);
uapi_tcxo_delay_ms((uint32_t)TEST_TCXO_DELAY_500MS);
osal_printk("pwm cyc_done_cnt:%u, duty_radio:[%u/%u]\r\n", g_pwm_cyc_done_cnt,
cfg_repeat.high_time, cfg_repeat.high_time + cfg_repeat.low_time);
cfg_repeat.low_time++;
cfg_repeat.high_time--;
}
uapi_pwm_stop_group(CONFIG_PWM_GROUP_ID);
#endif
#if defined(CONFIG_PWM_SUPPORT_LPM)
uapi_pm_remove_sleep_veto(PM_USER0_VETO_ID); /* remove veto sleep */
#endif
uapi_pwm_close(CONFIG_PWM_CHANNEL);
uapi_pwm_deinit();
}
static void *pwm_task(const char *arg)
{
unused(arg);
pwm_config_t cfg_no_repeat = {
100,
100,
0,
0xFF,
false
};
uapi_pin_set_mode(CONFIG_PWM_PIN, CONFIG_PWM_PIN_MODE);
uapi_pwm_init();
uapi_pwm_open(CONFIG_PWM_CHANNEL, &cfg_no_repeat);
uapi_pwm_register_interrupt(CONFIG_PWM_CHANNEL, pwm_sample_callback);
#ifdef CONFIG_PWM_USING_V151
uint8_t channel_id = CONFIG_PWM_CHANNEL;
/* channel_id can also choose to configure multiple channels, and the third parameter also needs to be adjusted
accordingly. */
uapi_pwm_set_group(CONFIG_PWM_GROUP_ID, &channel_id, 1);
/* Here you can also call the uapi_pwm_start interface to open each channel individually. */
uapi_pwm_start_group(CONFIG_PWM_GROUP_ID);
#else
uapi_pwm_start(CONFIG_PWM_CHANNEL);
#endif
uapi_tcxo_delay_ms((uint32_t)TEST_TCXO_DELAY_500MS);
uapi_pwm_close(CONFIG_PWM_CHANNEL);
uapi_pwm_deinit();
/* pwm repeat mode */
pwm_repeat_mode();
return NULL;
}
static void pwm_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)pwm_task, 0, "PwmTask", PWM_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, PWM_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the pwm_entry. */
app_run(pwm_entry);
注意事项¶
在调用uapi_pwm_deinit接口之前,需要先调用uapi_pwm_close接口。
PWM支持占空比为0。
PWM支持多路互补输出。
深睡唤醒之后需要先配置复用关系,再调用uapi_pwm_deinit接口去初始化,之后调用uapi_pwm_init接口初始化。
WDT¶
概述¶
WDT(Watch Dog Timer)看门狗计时器,一般用于CPU运行异常时实现异常恢复,如果系统正常运行,会定期喂狗,以防止计时器超时。如果系统由于某种原因停止运行或无法正常喂狗,导致计时器在设定的超时时间内未被重置,此时看门狗会认为系统出现故障,触发相应的处理措施,如复位系统或执行特定的错误处理程序。
WDT规格如下:
拥有一个CPU看门狗以及一个PMU看门狗,其中PMU看门狗不对用户开放使用。
CPU看门狗超时时间支持2s~32768s可调。
CPU看门狗支持直接复位以及中断后复位两种工作模式。
功能描述¶
WDT模块提供的接口及功能如下:
uapi_watchdog_init(uint32_t timeout):初始化Watchdog功能,设置看门狗超时时间,单位s(timeout表示看门狗超时时间)。
uapi_watchdog_deinit(void):去初始化Watchdog功能。
uapi_watchdog_set_time(uint32_t timeout):设置看门狗超时时间,单位s(如不设置,默认时间是8s)(timeout表示看门狗超时时间)。
uapi_watchdog_kick(void):重新启动计数器。
uapi_watchdog_enable(wdt_mode_t mode):使能看门狗(mode表示看门狗模式)。
uapi_watchdog_disable(void):关闭看门狗。
uapi_watchdog_get_left_time(uint32_t *timeout):获取看门狗剩余时间,单位ms(timeout表示剩余时间值)。
uapi_register_watchdog_callback(watchdog_callback_t callback):注册看门狗回调(callback表示看门狗超时后处理异常的回调函数)。
uapi_watchdog_suspend(uintptr_t arg):挂起看门狗模块,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_WATCHDOG_SUPPORT_LPM宏才能使用)
uapi_watchdog_resume(uintptr_t arg):恢复看门狗模块,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_WATCHDOG_SUPPORT_LPM宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 WATCHDOG相关宏描述
开发指引¶
WDT一般用于检测是否死机,如果超过喂狗等待的时间没有进行喂狗操作,根据Watchdog配置的使能模式产生一个系统复位或者上报狗中断。参考代码如下:
调用uapi_watchdog_init初始化并设置看门狗超时时间。
调用uapi_watchdog_enable,使能看门狗模块,可配置复位模式和中断模式。
调用uapi_watchdog_kick,进行喂狗操作,此时在idle任务中已实现了喂狗操作。
调用uapi_watchdog_get_left_time,获取看门狗定时器剩余时间(可选)。
调用uapi_watchdog_disable,关闭看门狗(正常情况下不建议关闭看门狗)。
示例:
#include "watchdog.h"
#include "watchdog_porting.h"
void sample_wdt(void)
{
uint32_t sample_remain_ms;
/* 设置开门狗超时时间 */
uapi_watchdog_init(CHIP_WDT_TIMEOUT_32S);/* 设置超时时间 */
uapi_watchdog_enable(WDT_MODE_RESET);/* 使能看门狗 */
osal_mdelay(5000); /* delay 5000 ms */
uapi_watchdog_kick(); /* 喂狗 */
uapi_watchdog_get_left_time(&sample_remain_ms); /* 获取剩余超时时间 */
osal_printk("sample_remain_ms = %x! \n", sample_remain_ms);
uapi_watchdog_disable();/* 关闭看门狗 */
}
注意事项¶
如果获取时间为0xFFFFFFFF,说明看门狗处于未使能状态。
看门狗在SDK中已经使能且已存在喂狗动作,在特殊场景下,如需长时间占用CPU,可将看门狗去使能或在业务代码中增加喂狗操作,避免正常业务场景引起看门狗复位。
看门狗默认超时时间为8s,flashboot中将狗重新配置为32s,使用时请注意。一般情况下,不建议修改超时时间。
Timer¶
概述¶
Timer是一种用来计时和产生定时事件的重要模块。它通常由一个计数器和一些相关的寄存器组成。定时器的核心功能是根据设定的时钟源和预设的计数值来进行计数,并在特定条件下产生中断或触发其他事件。
Timer规格如下:
提供4个定时器(Timer0~3)。
每个定时器提供两个32位寄存器用于计数。
支持超时中断以及重装载值。
功能描述¶
Timer模块提供的接口及功能如下:
uapi_timer_adapter(timer_index_t index, uint32_t int_id, uint16_t int_priority):适配定时器配置(index表示硬件定时器索引,int_id表示硬件定时器中断ID,int_priority表示硬件定时器中断优先级)。
uapi_timer_init(void):初始化Timer。
uapi_timer_deinit(void):去初始化Timer。
uapi_timer_create(timer_index_t index, timer_handle_t *timer):创建定时器(index表示硬件定时器索引,timer表示定时器处理返回值)。
uapi_timer_delete(timer_handle_t timer):删除指定定时器(timer表示被创建后的定时器)。
uapi_timer_start(timer_handle_t timer, uint32_t time_us, timer_callback_t callback, uintptr_t data):开启指定的定时器,开始计时(timer表示被创建后的定时器,time_us表示定时器超时时间,callback表示定时器回调函数,data表示传递给定时器回调函数的参数)。
uapi_timer_stop(timer_handle_t timer):停止当前定时器计时(timer表示被创建后的定时器)。
uapi_timer_get_max_us(void):用户可以获取到Timer最大可以设置的延时时间(us)。
uapi_timer_get_current_time_us(timer_index_t index, uint32_t *current_time_us):获取指定底层Timer定时器的当前时间(us)(index表示底层Timer定时器索引,current_time_us表示底层Timer定时器当前时间us值)。
uapi_timer_start_high_precision(timer_index_t index, timer_trigger_mode_t mode, uint32_t time_us, timer_irq_info_t* irq_info, high_precision_timer_callback_t callback):启动一个高精度的专用定时器(index表示硬件定时器索引,mode表示计时模式,time_us表示定时器超时时间,irq_info表示中断信息,callback表示定时器回调函数)。(打开CONFIG_TIMER_SUPPORT_HIGH_PRECISION宏才能使用)
uapi_timer_reset_high_precision(timer_index_t index, timer_trigger_mode_t mode, uint32_t time_us):重启一个高精度的专用定时器(index表示硬件定时器索引,mode表示计时模式,time_us表示定时器超时时间)。
(打开CONFIG_TIMER_SUPPORT_HIGH_PRECISION宏才能使用)
uapi_timer_stop_high_precision(timer_index_t index):停止一个高精度的专用定时器(index表示硬件定时器索引)。(打开CONFIG_TIMER_SUPPORT_HIGH_PRECISION宏才能使用)
uapi_timer_suspend(uintptr_t val):挂起定时器模块,低功耗情况使用(val表示挂起时所需要的参数)。(打开CONFIG_TIMER_SUPPORT_LPM宏才能使用)
uapi_timer_resume(uintptr_t val):恢复定时器模块,低功耗情况使用(val表示恢复时所需要的参数)。(打开CONFIG_TIMER_SUPPORT_LPM宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 TIMER相关宏描述
Timer ip using old version, load count must be aligned with 0xF. |
|||||
开发指引¶
使用Timer驱动接口创建一个5ms周期触发中断的定时器,参考步骤如下:
调用uapi_timer_adapter接口,配置定时器索引、定时器中断号和中断优先级。
调用uapi_timer_init接口,初始化定时器功能。
调用uapi_timer_create接口,创建一个定时器,函数参数句柄为唯一定时器标识。
调用uapi_timer_start接口,设置超时时间、超时回调函数、回调函数入参以及启动定时器。
调用uapi_timer_stop接口,停止当前定时器计时。
调用uapi_timer_delete接口,删除当前定时器。
示例:
#include "timer.h"
#define DELAY_5MS 5000
#define DELAY_1S 1000000
#define TIMER_IRQ_PRIO 3 /* 中断优先级范围,从高到低: 0~7 */
static timer_handle_t timer1_handle = 0;
static void timer1_callback(uintptr_t data);
void timer1_callback(uintptr_t data)
{
unused(data);
osal_printk("Timer1 5ms int test!\r\n");
/* 开启下一次timer中断 */
uapi_timer_start(timer1_handle, DELAY_5MS, timer1_callback, 0);
}
errcode_t test_timer_sample(void)
{
errcode_t ret;
/* timer 软件初始化 */
uapi_timer_init();
/* 设置 timer1 硬件初始化,设置中断号,配置优先级 */
ret = uapi_timer_adapter(TIMER_INDEX_1, TIMER_1_IRQN, TIMER_IRQ_PRIO);
/* 创建 timer1 软件定时器控制句柄 */
uapi_timer_create(TIMER_INDEX_1, &timer1_handle);
/* 启动定时器 */
uapi_timer_start(timer1_handle, DELAY_5MS, timer1_callback, 0);
osal_mdelay(DELAY_1S);
/* 停止定时器 */
uapi_timer_stop(timer1_handle);
/* 删除定时器 */
uapi_timer_delete(timer1_handle);
return ret;
}
注意事项¶
Timer创建的定时器超时时间单位为μs。
默认最多可同时创建3个高精度定时器(Timer0~2)。
Timer3默认作为liteos的系统时钟源,禁止使用uapi接口配置。
在非低功耗模式下,Timer可配置的最大超时时间约为4294s。
确定不需要使用当前高精度定时器后,需要调用uapi_timer_delete接口,释放该定时器资源。
禁止在Timer的回调函数中调用uapi_timer_stop、uapi_timer_delete等接口。
Systick¶
概述¶
Systick是单片机系统中的一种硬件设备或功能模块,用于提供精确的时间基准和定时功能。
系统定时规格如下:
Systick提供了两个32位的寄存器用于存放计数值,最高可计数到264-1。
可使用外部32.768kHz晶振或内部32kHz时钟作为时钟源。
功能描述¶
Systick模块提供的接口及功能如下:
uapi_systick_init(void):初始化Systick。
uapi_systick_deinit(void):去初始化Systick。
uapi_systick_count_clear(void):清除Systick计数。
uapi_systick_get_count(void):获取Systick计数值。
uapi_systick_get_s(void):获取Systick计数秒值。
uapi_systick_get_ms(void):获取Systick计数毫秒值。
uapi_systick_get_us(void):获取Systick计数微秒值。
uapi_systick_delay_count(uint64_t c_delay):按count计数延时(c_delay表示延时时间)。
uapi_systick_delay_s(uint32_t s_delay):按秒数延时(s_delay表示延时时间)。
uapi_systick_delay_ms(uint32_t m_delay):按毫秒数延时(m_delay表示延时时间)。
uapi_systick_delay_us(uint32_t u_delay):按微秒数延时(us_delay表示延时时间)。
uapi_systick_suspend(uintptr_t arg):挂起Systick模块,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_SYSTICK_SUPPORT_LPM宏才能使用)
uapi_systick_resume(uintptr_t arg):恢复Systick模块,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_SYSTICK_SUPPORT_LPM宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 SYSTICK相关宏描述
开发指引¶
调用uapi_systick_init接口,初始化Systick模块。
调用uapi_systick_get_count接口,获取当前Systick计数值。
调用uapi_systick_delay_ms接口,延迟入参传入的时间。
再次调用uapi_systick_get_count接口,获取当前Systick计数值。
示例:
#include "systick.h"
void test_systick_sample(void)
{
uint64_t count_before_delay_count;
uint64_t count_after_delay_count;
/* systick模块初始化 */
uapi_systick_init();
/* 通过count数差值验证延迟时间 */
count_before_delay_count= uapi_systick_get_count();
uapi_systick_delay_ms(1000);
count_after_delay_count = uapi_systick_get_count();
osal_printk("test case delay count %lu.\r\n", count_before_delay_count - count_after_delay_count);
}
注意事项¶
Systick时钟源使用外部32.768k或者内部32k时钟,最小计数单元为30μs左右,使用μs延时接口请注意。
Systick一般用于提供了一个稳定的时钟信号,作为整个单片机系统的基准时钟。高精度延时则使用TCXO。
TCXO¶
概述¶
TCXO(Temperature Compensated Crystal Oscillator)是一种温度补偿晶体振荡器,通过在电路中引入温度传感器和温度补偿电路,以降低温度对振荡频率的影响,从而提供更稳定的时钟信号。芯片内置了一块TCXO晶振及其计数单元,用于计数和延时,用户也可以修改时钟配置,使用外部晶振作为TCXO计数单元的时钟输入,TCXO规格如下:
内部TCXO高达32M,最小计数单元约为32ns。
TCXO计数器提供了两个32位的寄存器用于存放计数值,最高可计数到2^64-1。
功能描述¶
TCXO模块提供的接口及功能如下:
uapi_tcxo_init(void):初始化TCXO。
uapi_tcxo_deinit(void):去初始化TCXO。
uapi_tcxo_get_count(void):获取TCXO计数值。
uapi_tcxo_get_ms(void):获取TCXO计数毫秒值。
uapi_tcxo_get_us(void):获取TCXO计数微秒值。
uapi_tcxo_delay_ms(uint32_t m_delay):设置延迟毫秒数(m_delay表示延时毫秒数)。
uapi_tcxo_delay_us(uint32_t u_delay):设置延迟微秒数(u_delay表示延时微秒数)。
uapi_tcxo_suspend(uintptr_t arg):挂起TCXO模块,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_TCXO_SUPPORT_LPM宏才能使用)
uapi_tcxo_resume(uintptr_t arg):恢复TCXO模块,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_TCXO_SUPPORT_LPM宏才能使用)
KCONFIG配置¶
配置宏具体描述如表1所示。
表 1 TCXO相关宏描述
开发指引¶
调用uapi_tcxo_init接口,初始化TCXO模块。
调用uapi_tcxo_get_count接口,获取当前TCXO计数值。
调用uapi_tcxo_delay_ms接口,延迟入参传入的时间。
示例:
#include "tcxo.h"
void test_tcxo_sample(void)
{
uint64_t count_before_delay_count;
uint64_t count_after_delay_count;
/* tcxo模块初始化 */
uapi_tcxo_init();
/* 通过count差值验证延迟时间 */
count_before_delay_count = uapi_tcxo_get_count();
uapi_tcxo_delay_ms(1000);
count_after_delay_count= uapi_tcxo_get_count();
osal_printk("test case delay count %lu.\r\n", count_before_delay_count - count_after_delay_count);
return;
}
注意事项¶
无。
Flash¶
概述¶
Flash是一种非易失快闪记忆体技术,又称为闪存,通常支持SPI协议。Flash可以通过SPI协议实现读、写和擦除等多种命令。
功能描述¶
Flash模块提供的接口及功能如下如下:
uapi_flash_init(flash_id_t id):初始化Flash(id表示flash id)。
uapi_flash_deinit(flash_id_t id):去初始化Flash(id表示flash id)。
uapi_flash_write_data(flash_id_t id, uint32_t addr, const uint8_t *src, uint32_t length):写入数据到Flash(id表示flash id,addr表示flash写入地址,src表示数据地址,length表示数据长度)。
uapi_flash_write_data_without_align(flash_id_t id, uint32_t addr, const uint8_t *src, uint32_t length):以非对齐地址写入数据到Flash(id表示flash id,addr表示flash写入地址,src表示数据地址,length表示数据长度)。
uapi_flash_read_data(flash_id_t id, uint32_t addr, uint8_t *dst, uint32_t length):从Flash读取数据(id表示flash id,addr表示flash读入地址,dst表示数据地址,length表示数据长度)。
uapi_flash_read_data_without_align(flash_id_t id, uint32_t addr, uint8_t *dst, uint32_t length):以非对齐地址从Flash读取数据(id表示flash id,addr表示flash读入地址,dst表示数据地址,length表示数据长度)。
uapi_flash_chip_erase(flash_id_t id):擦除整片Flash数据(id表示flash id)。
uapi_flash_block_erase(flash_id_t id, uint32_t addr, uint32_t length, bool is_wait):按块擦除Flash数据(id表示flash id,addr表示flash擦除地址,length表示擦除长度,is_wait表示是否等待擦除完成)。
uapi_flash_sector_erase(flash_id_t id, uint32_t addr, bool is_wait):按扇区擦除Flash数据(id表示flash id,addr表示flash擦除地址,is_wait表示是否等待擦除完成)。
uapi_flash_suspend(flash_id_t id):Flash休眠(id表示flash id)。
uapi_flash_resume(flash_id_t id):Flash休眠唤醒(id表示flash id)。
uapi_flash_switch_to_deeppower(flash_id_t id):Flash进入掉电模式(id表示flash id)。
uapi_flash_resume_from_deeppower(flash_id_t id):Flash掉电模式唤醒(id表示flash id)。
uapi_flash_read_security_status(flash_id_t id, uint8_t *read_data):读取Flash安全寄存器状态(id表示flash id,read_data表示读取的数据)。
uapi_flash_send_cmd_exe(flash_id_t id, flash_cmd_exe_t *cmd_exe):发送命令到Flash(id表示flash id,cmd_exe表示flash命令)。
uapi_flash_get_info(flash_id_t id, flash_info_t *flash_info):获取Flash当前信息(id表示flash id,flash_info表示flash信息)。
uapi_flash_reset(flash_id_t id):Flash复位(id表示flash id)。
uapi_flash_is_processing(flash_id_t id):Flash是否正在工作(id表示flash id)。
uapi_flash_read_id(flash_id_t id, uint32_t *manufacture_id):Flash读取制造ID(id表示flash id,manufacture_id表示flash制造id)。
uapi_flash_read_unique_id(flash_id_t id, uint8_t *unique_id:Flash读取唯一ID(id表示flash id,manufacture_id表示flash唯一id)。
uapi_flash_read_device_id(flash_id_t id, uint16_t *device_id):Flash读取设备ID(id表示flash id,device_id表示flash设备id)。
uapi_flash_read_status(flash_id_t id, uint8_t *status):读Flash状态等待空闲(id表示flash id,status表示flash状态)。
uapi_flash_save_manufacture(flash_id_t id, uint32_t manufacture_id):保存Flash制造ID(id表示flash id,manufacture_id表示flash制造id)。
uapi_flash_set_spi_baud(flash_id_t id, uint32_t bus_clk, uint32_t freq_mhz):设置SPI波特率(id表示flash id,bus_clk表示总线时钟,freq_mhz表示SPI的工作时钟频率)。
KCONFIG配置¶
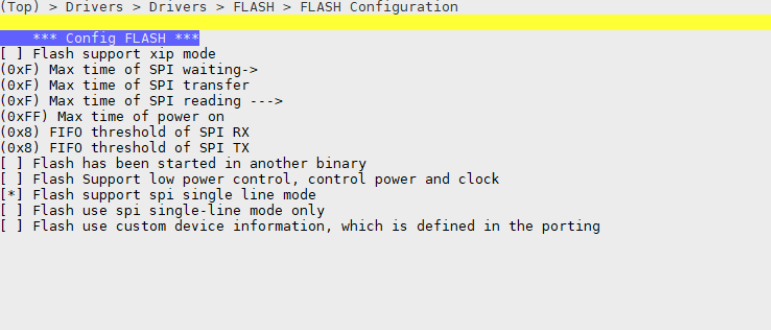
配置宏具体描述如表1所示。
表 1 FLASH相关宏描述
Flash use custom device information, which is defined in the porting. |
开发指引¶
外部Flash开发适配需由客户自己选型和适配,部分参考代码见文件:drivers/chips/bs2x/porting/flash/flash_porting.c和drivers/chips/bs2x/main_init/main_init.c
/* drivers/chips/bs2x/porting/flash/flash_porting.c */
static flash_cfg_t g_flash_porting_config[FLASH_MAX] = {
{
.isinit = 0,
.flash_manufacturer = FLASH_MANUFACTURER_MAX,
.unique_id = 0,
.bus = SPI_BUS_1,
.mode = HAL_SPI_FRAME_FORMAT_STANDARD,
.is_xip = false,
.attr = {
.is_slave = false,
.slave_num = 1,
.bus_clk = SPI_CLK_FREQ,
.freq_mhz = 4,
.clk_polarity = (uint32_t)SPI_CFG_CLK_CPOL_0,
.clk_phase = (uint32_t)SPI_CFG_CLK_CPHA_0,
.frame_format = SPI_CFG_FRAME_FORMAT_MOTOROLA_SPI,
.spi_frame_format = (uint32_t)HAL_SPI_FRAME_FORMAT_STANDARD,
.frame_size = (uint32_t)HAL_SPI_FRAME_SIZE_8,
.sste = SPI_CFG_SSTE_DISABLE,
},
.extra_attr = {
.tx_use_dma = false,
.rx_use_dma = false,
.qspi_param = { 0 },
},
},
};
/* drivers/chips/bs2x/main_init/main_init.c */
static void ota_extern_flash_init(void)
{
#if defined(SUPPORT_EXTERN_FLASH)
flash_porting_pinmux_cfg(0);
uint32_t manufacture_id = 0;
uapi_flash_init(0);
uapi_flash_read_id(0, &manufacture_id);
flash_save_manufacturer(0, manufacture_id);
#endif
}
新选型的外部Flash适配,需要在drivers/chips/bs2x/porting/flash/flash_config_info_porting.h中维护全局变量g_flash_device_parameter,该全局变量的结构体为flash_device_parameter_t:
typedef struct flash_device_parameter {
uint32_t manufacturer_id; /*!< @if Eng Flash manufacturer id.
@else Flash 制造id。@endif */
uint32_t flash_size; /*!< @if Eng Flash size.
@else Flash 大小。@endif */
uint8_t security_reg_cmd; /*!< @if Eng Security reg cmd.
@else 安全寄存器命令。@endif */
uint8_t suspend_cmd; /*!< @if Eng Suspend cmd.
@else 休眠命令。@endif */
uint8_t resume_cmd; /*!< @if Eng Resume cmd.
@else 唤醒命令。@endif *
}
manufacturer_id:在单线模式下即可读取,发送0x9F读取id,通过手册中查找,对比两种方式得到的结果是否一致。下面列举一些常见厂商的manufacturer_id位置 。


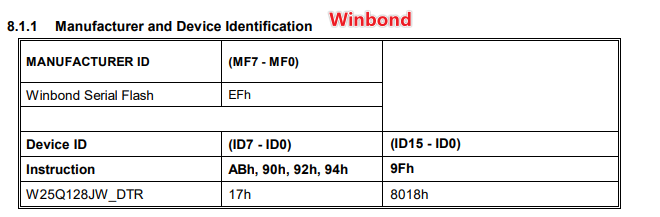
uint32_t manufacture_id; uapi_flash_init(FLASH_0); uapi_flash_read_id(FLASH_0, &manufacture_id);
flash_size:Flash总空间通常在第一章介绍


security_reg_cmd:读取Flash状态寄存器的指令,查找手册中的Read Security Registers,可在Commands Table中查到。
suspend_cmd和resume_cmd:支持休眠的Flash,手册中搜索suspend和resume,可在Commands Table中查到。
drivers/chips/bs2x/porting/flash/flash_config_info_porting.h中还维护了一个全局变量g_flash_need_set_qe,该全局变量保存了使能四线访问前需要开启QE Bit的FLash的manufacturer id,以及开启QE Bit的操作,是否需要开启QE Bit,可以在手册中搜索Quad Enable (QE)。
注意事项¶
不支持XIP模式。
对Flash进行读写擦操作时,请确保Flash已完成初始化。
需客户基于Flash选型自行适配。
SFC¶
概述¶
SFC(SPI Flash Controller)是一个AHB SPI Flash控制器,可通过对SFC的映射地址区间以AHB Slave访问来操作SFC模块挂载的Flash。其同样支持以APB Slave方式以类似传统SPI的形式访问挂载的Flash。
功能描述¶
uapi_sfc_init(sfc_flash_config_t *config): 初始化SFC模块,配置参数包括对映射地址空间和读写形式的配置(config表示初始化参数)。
uapi_sfc_init_rom(sfc_flash_config_t *config): 以兼容模式初始化SFC模块,此接口下仅mapping_addr参数生效,读写形式均以Flash通用的读(0x03)写(0x02)指令进行。在uapi_sfc_init返回值为 ERRCODE_SFC_FLASH_NOT_SUPPORT(0x80001341)时也会套用该配置(config表示初始化参数)。
uapi_sfc_deinit(void): 对SFC驱动进行去初始化。
uapi_sfc_reg_read(uint32_t flash_addr, uint8_t *read_buffer, uint32_t read_size): 提供寄存器模式读功能,读取的数据将按字节存入read_buffer中。不允许在中断中调用(flash_addr表示数据所在的Flash首地址,read_buffer表示用于接收数据的buffer,read_size表示读取的字节数)。
uapi_sfc_reg_write(uint32_t flash_addr, uint8_t *write_data, uint32_t write_size): 提供寄存器模式写功能,预计写入的数据按字节存入write_data中。不允许在中断中调用(flash_addr表示目标Flash首地址,write_data表示预计写入的数据,write_size表示写入数据的字节数)。
uapi_sfc_reg_erase(uint32_t flash_addr, uint32_t erase_size): 使用寄存器模式进行对Flash的擦除,不使能写回时强制要求地址和大小按扇区对齐。不允许在中断中调用(flash_addr表示擦除的首地址,erase_size表示擦除的Flash空间的大小)。
uapi_sfc_reg_erase_chip(void): 使用寄存器模式对整片Flash进行擦除。不允许在中断中调用。
uapi_sfc_regs_other_flash_opt(sfc_flash_op_t cmd_type, uint8_t cmd, uint8_t *buffer, uint32_t length): 使用寄存器模式对Flash属性进行读写。不允许在中断中调用(cmd_type表示设置指令的读写类型,cmd表示SPI指令,buffer表示数据缓冲区,length表示需要读/写的数据长度,其值需要小于4)。
uapi_sfc_lock_protect(sfc_flash_protect_region_t region): 使能SFC写保护(region表示Flash保护的区域)。(打开CONFIG_SFC_SUPPORT_WRITE_PROTECT宏才能使用)
uapi_sfc_unlock_protect(void): 封装接口,关闭Flash写保护。(打开CONFIG_SFC_SUPPORT_WRITE_PROTECT宏才能使用)
uapi_sfc_dma_write(uint32_t flash_addr, uint8_t *write_buffer, uint32_t write_size):提供寄存器模式写功能,预计写入的数据按字节存入write_data中。不允许在中断中调用(flash_addr表示目标Flash首地址,write_buffer表示预计写入的数据,write_size表示写入数据的字节数)。(打开CONFIG_SFC_SUPPORT_DMA宏才能使用)
uapi_sfc_dma_read(uint32_t flash_addr, uint8_t *read_buffer, uint32_t read_size):提供DMA模式读功能,读取的数据将按字节存入read_buffer中。不允许在中断中调用(flash_addr表示数据所在的Flash首地址,read_buffer表示用于接收数据的buffer,read_size表示读取的字节数)。(打开CONFIG_SFC_SUPPORT_DMA宏才能使用)
uapi_sfc_suspend(uintptr_t arg):挂起SFC模块,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_SFC_SUPPORT_LPM宏才能使用)
uapi_sfc_resume(uintptr_t arg):恢复SFC模块,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_SFC_SUPPORT_LPM宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 SFC相关宏描述
SFC_SUPPORT_DMA:SFC规格不支持APB_MASTER DMA访问,故在此定义下的uapi_sfc_dma_xxx接口不可用。
SFC_ALLOW_ERASE_WRITEBACK:擦除接口内部自动回写,需要8K的DTCM空间充当全局变量,本产品的规格不建议开启。
SFC_SUPPORT_LPM:支持SFC低功耗现场保存恢复,SDK内部低功耗流程默认已经实现,调试低功耗请务必打开此配置项。
SFC_SUPPORT_WRITE_PROTECT:开启SDK内部封装的写保护接口。
SFC_USE_CUSTOMIZED_DEVICE_INFO:打开即使用porting层进行适配的自定义配置组,关闭该宏则使用SDK内部include/driver/sfc/sfc_config_info.h中默认适配的配置项。合封Flash已于SDK中自定义配置组中适配,打开该宏即可。
开发指引¶
SDK默认会对SFC驱动进行初始化,使用APB Slave接口时无需初始化,示例代码如下:
#include "soc_osal.h"
#include "securec.h"
#include "sfc.h"
#include "sfc_porting.h"
#include "app_init.h"
#include "memory_config_common.h"
#define SFC_TASK_PRIO 24
#define SFC_TASK_STACK_SIZE 0x1000
#define SFC_SAMPLE_LEN 0x80000
#define SFC_PRINT_BUFF_LEN 32
uint8_t g_print_data_buff[SFC_PRINT_BUFF_LEN] = {0};
uint8_t g_write_data_buff[SFC_PRINT_BUFF_LEN] = {0};
static void sfc_sample_start_api_test(void)
{
osal_printk("API test start\r\n");
uint32_t remained_len = CONFIG_SFC_SAMPLE_USER_SIZE;
uint32_t start_addr = CONFIG_SFC_SAMPLE_USER_ADDR;
while (remained_len > 0) {
uint32_t cur_len = remained_len > SFC_PRINT_BUFF_LEN ? SFC_PRINT_BUFF_LEN : remained_len;
uapi_sfc_reg_read(start_addr, g_print_data_buff, cur_len);
for (uint8_t i = 0; i < cur_len; i++) {
osal_printk("%02x ", g_print_data_buff[i]);
}
uapi_sfc_reg_write(start_addr, g_write_data_buff, cur_len);
start_addr += cur_len;
remained_len -= cur_len;
osal_printk("\r\n");
}
start_addr = CONFIG_SFC_SAMPLE_USER_ADDR;
remained_len = CONFIG_SFC_SAMPLE_USER_SIZE;
while (remained_len > 0) {
uint32_t cur_len = remained_len > SFC_PRINT_BUFF_LEN ? SFC_PRINT_BUFF_LEN : remained_len;
uapi_sfc_reg_read(start_addr, g_print_data_buff, cur_len);
for (uint8_t i = 0; i < cur_len; i++) {
osal_printk("%02x ", g_print_data_buff[i]);
}
start_addr += cur_len;
remained_len -= cur_len;
osal_printk("\r\n");
}
}
static void *sfc_task(const char *arg)
{
unused(arg);
for (uint8_t i = 0; i < SFC_PRINT_BUFF_LEN; i++) {
g_write_data_buff[i] = i;
}
/* Erase User space */
osal_printk("Erasing for API sample...\r\n");
errcode_t ret = uapi_sfc_reg_erase(CONFIG_SFC_SAMPLE_USER_ADDR, CONFIG_SFC_SAMPLE_USER_SIZE);
if (ret != ERRCODE_SUCC) {
osal_printk("flash erase failed! ret = %x\r\n", ret);
return NULL;
}
osal_printk("Start API read sample...\r\n");
sfc_sample_start_api_test();
return NULL;
}
static void sfc_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)sfc_task, 0, "SFCTask", SFC_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, SFC_TASK_PRIO);
osal_kfree(task_handle);
}
osal_kthread_unlock();
}
注意事项¶
SFC相关的代码请务必放在ITCM上,本产品的SFC驱动是保持XIP执行链路的唯一手段。
XIP执行时,取指性能将降低10~60倍(取决于Flash性能及老化程度),故有性能要求的驱动务必不要放到Flash上使用XIP执行。
驱动提供的uapi形式的APB slave接口,传入的地址为Flash真实地址而非映射地址。
根据芯片限制,严禁使用直接访问映射地址的形式写合封Flash。
QDEC¶
概述¶
QDEC(Quadrature Decoder)为正交编码器,提供正交编码传感器信号的缓冲解码。编码器内有2个监测点,相位相差90°,这意味着一个监测点的电平总是在另一个监测点之前改变。滚轮拨动一格,2个监测点将分别检测到一个脉冲。当正交编码器启动时,解码器对两种输入波形进行连续采样,并将当前采样(n)与前一采样(n-1)进行比较解码,比较结果如表1所示。
表 1 QDEC输入波形采样结果对比
功能描述¶
QDEC模块提供的接口及功能如下:
uapi_qdec_init(qdec_config_t const *config):初始化QDEC模块(config表示初始化配置参数)。
uapi_qdec_deinit(void):去初始化QDEC。
uapi_qdec_enable(void):使能QDEC。
uapi_qdec_disable(void):去使能QDEC。
uapi_qdec_read_accumulators(int16_t *acc, int16_t *accdbl):读取QDEC累加寄存器(acc表示注册累计有效转换的次数,accdbl表示注册累计检测到重复转换的次数)。
uapi_qdec_register_callback(qdec_callback_t callback):注册QDEC中断回调函数(callback表示QDEC中断回调函数)。
qdec_port_set_acc_per_roll(uint8_t acc_per_roll):配置滚轮滚动一次时,累加器增加的值,适用于较为特殊的光栅传感器。
开发指引¶
示例:
首先调用qdec_port_pinmux_init接口,将IO复用为QDEC功能。
其次调用uapi_qdec_init接口,对QDEC做初始化,初始化时可配的参数如结构体所示。
uapi_qdec_init入参结构体:
typedef struct { hal_qdec_report_per_t reportper; /*!< @if Eng Report period in samples. @else 样本报告周期 @endif */ hal_qdec_sample_per_t sampleper; /*!< @if Eng Sampling period in microseconds. @else 采样周期(微秒级) @endif */ hal_qdec_defen_num_t defen_num; /*!< @if Eng Debounce num. @else 去抖周期 @endif */ uint32_t psela; /*!< @if Eng Pin number for A input. @else A输入的管脚编号 @endif */ uint32_t pselb; /*!< @if Eng Pin number for B input. @else B输入的管脚编号 @endif */ uint32_t pselled; /*!< @if Eng Pin number for LED output. @else LED输出的管脚编号 @endif */ uint32_t ledpre; /*!< @if Eng Time of LED is switched on before sampling in microseconds @else 采样前LED打开的时间(微秒级) @endif */ hal_qdec_led_pol_t ledpol; /*!< @if Eng Active LED polarity. @else 有源LED极性 @endif */ bool defence; /*!< @if Eng Switch of debouncing filter. @else 去抖滤波器功能开关 @endif */ bool sample_inten; /*!< @if Eng Enabling sample ready interrupt. @else 使能样本就绪中断 @endif */ uint8_t interrupt_priority; /*!< @if Eng QDEC interrupt priority. @else QDEC中断优先级 @endif */ } qdec_config_t; #define QDEC_DEFAULT_CONFIG \ { \ .reportper = QDEC_REPORTPER_1, \ .sampleper = QDEC_SAMPLEPER_512US, \ .defen_num = QDEC_DEBOUNCE_NUM_2, \ .psela = QDEC_CONFIG_PIO_A, \ .pselb = QDEC_CONFIG_PIO_B, \ .pselled = QDEC_CONFIG_PIO_LED, \ .ledpre = 256, \ .ledpol = QDEC_LED_POL_ACTIVE_HIGH, \ .defence = true, \ .sample_inten = false, \ .interrupt_priority = IRQ_QDEC, \ }
调用uapi_qdec_register_callback以及uapi_qdec_enable接口,注册QDEC中断触发时的回调函数并使能QDEC。
static qdec_config_t g_qdec_config = QDEC_DEFAULT_CONFIG; static int32_t qdec_report_callback(int argc, char *argv[]) { UNUSED(argv); g_qdec_count += argc; printf("curren count is: %d. \r\n", g_qdec_count); return ERRCODE_SUCC; } int32_t test_qdec_open(void) { uapi_qdec_init(&g_qdec_config); uapi_qdec_register_callback(qdec_report_callback); uapi_qdec_enable(); return TEST_SUITE_OK; }
注意事项¶
如果接地错误,很容易出现双滚错误或误报滚动。首次初始化时管脚可能产生电平变化导致上报一次双滚错误,该错误可忽略。
KEYSCAN¶
概述¶
KEYSCAN为键盘扫描模块,支持行扫描和列扫描模式,最大支持16×8矩阵键盘,未使用的引脚可以通过配置寄存器关闭,支持芯片算法防鬼键,支持IO端口可旁路的防抖设计。
功能描述¶
KEYSCAN模块提供的接口及功能如下:
uapi_keyscan_init(keyscan_pulse_time_t time, keyscan_mode_t mode, keyscan_int_t event_type):KEYSCAN初始化(time表示Keyscan配置扫描时长,mode表示 Keyscan配置扫描模式,event_type表示Keyscan配置中断类型)。
uapi_keyscan_deinit(void):KEYSCAN去初始化。
uapi_keyscan_enable(void):KEYSCAN使能。
uapi_keyscan_disable(void):KEYSCAN去使能。
uapi_keyscan_register_callback(keyscan_report_callback_t callback):KEYSCAN回调注册(callback表示Keyscan的回调函数)。
uapi_keyscan_unregister_callback(keyscan_report_callback_t callback):KEYSCAN回调去注册(callback表示Keyscan的回调函数)。
uapi_set_keyscan_value_map(uint8_t **map_addr, uint16_t row, uint8_t col):KEYSCAN键值map注册(map_addr表示键值矩阵地址,row表示键值矩阵的行数,col表示键值矩阵的列数)。
uapi_keyscan_suspend(uintptr_t arg):挂起所有Keyscan通道,低功耗情况使用(arg表示挂起时所需要的参数)。(打开CONFIG_KEYSCAN_SUPPORT_LPM宏才能使用)
uapi_keyscan_resume(uintptr_t arg):恢复所有Keyscan通道,低功耗情况使用(arg表示恢复时所需要的参数)。(打开CONFIG_KEYSCAN_SUPPORT_LPM宏才能使用)
KCONFIG配置¶

配置宏具体描述如表1所示。
表 1 KEYSCAN相关宏描述
开发指引¶
可配置项主要在KEYSCAN对应的porting层头文件中,下文将介绍重要可配置项的功能。
#define KEYSCAN_DEFAULT_CONFIG \
{ \
.direction = ROW_SCAN_DIR, \ 行列扫描方向
.scan_mode = HAL_KEYSCAN_MODE_0, \ 行列扫描模式
.pulse_time = EVERY_ROW_PULSE_10_US, \ 扫描脉冲时长
.wait_time = WAITING_30_AND_5_US, \ 扫描持续时长
.idle_time = IDLE_3_MS_AFTER_SCAN, \ 多次扫描间等待时长
.defence_time = SAMPLE_3TIMES_DEFENCE, \ 防抖次数
.ghost_check = false, \硬件防鬼开关
.io_de = true, \
}
// keyscan两级分频器的分频比配置,分频系数为CLK_HIGH_DIV*CLK_LOW_DIV,默认配置为
#define CLK_HIGH_DIV 0x28
#define CLK_LOW_DIV 0xa
// 如需降低分频比以优化keyscan时延,推荐配置为8M,即
#define CLK_HIGH_DIV 0x2
#define CLK_LOW_DIV 0x2
示例:
如使用自定义模式,首先调用keyscan_porting_set_gpio接口确认要使用的goio,先写row,再写column。
#if defined(CONFIG_KEYSCAN_USER_CONFIG_TYPE) uint8_t user_gpio_map[CONFIG_KEYSCAN_ENABLE_ROW + CONFIG_KEYSCAN_ENABLE_COL] = { 31, 24, 14, 23, 27, 28, 10, 11, 30, 13, 15, 16, 25, 26, 12, 22, 2, 3, 4, 5, 6, 21, 9, 29}; if (keyscan_porting_set_gpio(user_gpio_map)) { return; } #endif
调用uapi_set_keyscan_value_map接口进行键值map注册,键值map数组的行列需要和行列最大值一致,不使用的按键填充为0x00即可。
uint8_t g_key_map_test[KEY_SCAN_MAX_ROW][KEY_SCAN_MAX_COL] = { { 0x29, 0x2B, 0x14, 0x35, 0x04, 0x1E, 0x1D, 0x00 }, { 0x3D, 0x3C, 0x08, 0x3B, 0x07, 0x20, 0x06, 0x00 }, { 0x00, 0x39, 0x1A, 0x3A, 0x16, 0x1F, 0x1B, 0x00 }, { 0x00, 0x00, 0x00, 0xE0, 0x00, 0x00, 0xE4, 0x00 }, { 0x0A, 0x17, 0x15, 0x22, 0x09, 0x21, 0x19, 0x05 }, { 0x0B, 0x1C, 0x18, 0x23, 0x0D, 0x24, 0x10, 0x11 }, { 0x3F, 0x30, 0x0C, 0x2E, 0x0E, 0x25, 0x36, 0x00 }, { 0x00, 0x00, 0x12, 0x40, 0x0F, 0x26, 0x37, 0x00 }, { 0x34, 0x2F, 0x13, 0x2D, 0x33, 0x27, 0x00, 0x38 }, { 0x3E, 0x2A, 0x00, 0x41, 0x31, 0x42, 0x28, 0x2C }, { 0x00, 0x00, 0xE3, 0x00, 0x00, 0x43, 0x00, 0x51 }, { 0xE2, 0x00, 0x00, 0x00, 0x00, 0x45, 0xE5, 0xE6 }, { 0x00, 0x53, 0x00, 0x00, 0xE1, 0x44, 0x00, 0x4F }, { 0x52, 0x00, 0x00, 0x00, 0x00, 0x00, 0x4C, 0x50 }, { 0x5F, 0x5C, 0x61, 0x5E, 0x59, 0x62, 0x55, 0x5B }, { 0x54, 0x60, 0x56, 0x57, 0x5D, 0x5A, 0x58, 0x63 }, }; uapi_set_keyscan_value_map((uint8_t **)g_key_map_test, KEY_SCAN_MAX_ROW, KEY_SCAN_MAX_COL);
调用uapi_keyscan_init接口,初始化KEYSCAN,当前入参为脉冲时间(param1)、扫描模式(param2)、中断时间(param3),默认值为0、0、3。
uapi_keyscan_init(pulse, mode, scan_int);调用uapi_keyscan_register_callback以及uapi_keyscan_enable接口,注册KEYSCAN中断回调函数并使能KEYSCAN。
int test_key_scan_funcs(void) { errcode_t ret = ERRCODE_FAIL; ret = uapi_keyscan_register_callback(key_scan_report_callback); if (ret != ERRCODE_SUCC) { return TEST_SUITE_TEST_FAILED; } uapi_keyscan_enable(); return TEST_SUITE_OK; }
开启CONFIG_KEYSCAN_ENABLE_REP_ALL_KEY后,中断上报将换为keyscan_porting_all_keys_report,会上报同时按下的所有按键,长按时会每个扫描周期上报一次,用户需根据扫描频率调整中断响应的阈值。
开启CONFIG_KEYSCAN_SUPPORT_SW_DEFENCE宏后,将一个空闲的管脚配置到CONFIG_KEYSCAN_ANOTHER_COL,并将列管脚的个数+1。keyscan功能执行时便不会出现微小抖动下的按键误报。由于按键防抖功能开启后会占用一个gpio管脚,因此CONFIG_KEYSCAN_SUPPORT_SW_DEFENCE宏默认关闭,需要用户根据情况进行配置。
BS2X提供了软件防鬼键功能,开启CONFIG_KEYSCAN_SOFTWARE_GHOST_DETECT后,Keyscan的回调函数里会添加keyscan_sw_ghost_detect,将形成鬼键的第三个按键和鬼键上报的第四个按键从上报的buffer中删除,只上报最初按下的两个键,与此同时新按下的其余按键也不会继续上报,以此告知用户出现了鬼键现象。软件防鬼功能不能与硬件防鬼同时打开。
注意事项¶
KEYSCAN使用时需要做好接地,否则会出现键值误报的问题。
PDM¶
概述¶
PDM(Pulse Density Modulation)是一种用数字信号表示模拟信号的调制方法。而另一种常用的将模拟量转换为数字量的方法PCM则使用等间隔采样方法,将每次采样的模拟分量幅度表示为N位的数字分量(N = 量化深度),因此PCM方式每次采样的结果都是N bit字长的数据。PDM使用远高于PCM采样率的时钟采样调制模拟分量,只有1位输出时,为0或1。因此通过PDM方式表示的数字音频也被称为Oversampled 1-bit Audio。
282X搭载的音频数模转换模块采用PDM方法进行采样,处理后输出PCM数据。数据来源可以为DMIC或AMIC。
功能描述¶
PDM模块提供的接口及功能如下:
uapi_pdm_init(void):初始化PDM。
uapi_pdm_deinit(void):去初始化PDM。
uapi_pdm_set_attr(uint8_t mic, const pdm_config_t *attr):设置PDM通道的属性(mic表示需要配置的通道,attr表示配置参数)。
uapi_pdm_get_attr(uint8_t mic, pdm_config_t *attr):获取PDM通道的属性(mic表示需要获取的通道,attr表示用于存储获取的属性参数)。
uapi_pdm_start(void):启动PDM采样。
uapi_pdm_stop(void):停止PDM采样。
uapi_pdm_get_fifo_addr(void):获取PDM的FIFO基地址。
uapi_pdm_get_fifo_deepth(void):获取PDM的FIFO深度。
KCONFIG配置¶
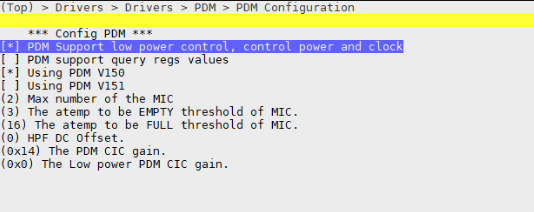
配置宏具体描述如表1所示。
表 1 PDM相关宏描述
开发指引¶
示例:
首先进行PDM通道参数配置,目前可配的参数如下结构体所示。
信号源为DMIC时按如下配置: int test_pdm_config(void) { pdm_config_t config = { 0 }; if (argc != PDM_CONFIG_PARAM_NUM) { return ERRCODE_TEST_SUITE_ERROR_BAD_PARAMS; } pdm_mic_t mic = (pdm_mic_t)HAL_PDM_DMIC_0; config.srcdn_src_mode = DOUBLE_EXTRACT; errcode_t ret = uapi_pdm_set_attr(mic, &config); if (ret != ERRCODE_SUCC) { return ERRCODE_TEST_SUITE_CONFIG_FAILED; } return ERRCODE_TEST_SUITE_OK; } 信号源为AMIC时按如下配置: void test_pdm_config(void) { uint8_t mic = HAL_PDM_AMIC; pdm_config_t config = { 0 }; config.srcdn_src_mode = TRIPLE_EXTRACT; if (uapi_pdm_set_attr(mic, &config) == ERRCODE_SUCC) { osal_printk("pdm config attr succ!\r\n"); } else { osal_printk("pdm config attr fail!\r\n"); } }
开启PDM采样并从FIFO中读取采样值。
int32_t app_pdm_start_dma_transfer(uint32_t *pdm_buffer, dma_transfer_cb_t trans_done, dma_channel_t *channel) { dma_ch_user_peripheral_config_t transfer_config; transfer_config.src = uapi_pdm_get_fifo_addr(); transfer_config.dest = (uint32_t)(uintptr_t)pdm_buffer; transfer_config.transfer_num = CONFIG_PDM_TRANSFER_LEN_BY_DMA; transfer_config.src_handshaking = HAL_DMA_HANDSHAKING_MIC45_UPLINK_REQ; transfer_config.dest_handshaking = 0; transfer_config.trans_type = HAL_DMA_TRANS_PERIPHERAL_TO_MEMORY_DMA; transfer_config.trans_dir = HAL_DMA_TRANSFER_DIR_PERIPHERAL_TO_MEM; transfer_config.priority = PDM_DMA_PRIORITY; transfer_config.src_width = HAL_DMA_TRANSFER_WIDTH_32; transfer_config.dest_width = HAL_DMA_TRANSFER_WIDTH_32; transfer_config.burst_length = 0; transfer_config.src_increment = HAL_DMA_ADDRESS_INC_NO_CHANGE; transfer_config.dest_increment = HAL_DMA_ADDRESS_INC_INCREMENT; transfer_config.protection = HAL_DMA_PROTECTION_CONTROL_BUFFERABLE; if (uapi_dma_configure_peripheral_transfer_single(&transfer_config, channel, trans_done, (uintptr_t)NULL) != ERRCODE_SUCC) { osal_printk("DMA configure fail.\r\n"); return 1; } if (uapi_dma_start_transfer((uint8_t)*channel) != ERRCODE_SUCC) { osal_printk("DMA start transfer fail.\r\n"); return 1; } return 0; } static void app_dma_transfer_done_callback(uint8_t int_type, uint8_t channel, uintptr_t arg) { unused(arg); unused(channel); switch (int_type) { case HAL_DMA_INTERRUPT_TFR: g_dma_trans_done = 1; break; case HAL_DMA_INTERRUPT_BLOCK: g_dma_trans_done = 1; break; case HAL_DMA_INTERRUPT_ERR: osal_printk("DMA transfer error.\r\n"); break; default: break; } } 信号源为DMIC时按如下配置: void *pdm_task(const char *arg) { unused(arg); dma_channel_t channel; app_pdm_init_pin(); /* PDM init. */ uapi_pdm_deinit(); uapi_pdm_init(); app_pdm_set_config(); if (uapi_pdm_start() == ERRCODE_SUCC) { osal_printk("pdm start transfer succ!\r\n"); } uapi_dma_init(); uapi_dma_open(); while (1) { g_dma_trans_done = 0; if (app_pdm_start_dma_transfer(g_app_pdm_dma_data, app_dma_transfer_done_callback, &channel) != 0) { continue; } while (!g_dma_trans_done) { uapi_watchdog_kick(); } uapi_dma_end_transfer(channel); for (uint32_t i = 0; i < CONFIG_PDM_TRANSFER_LEN_BY_DMA; i++) { g_app_pdm_buffer[g_app_pdm_buffer_filled_count++] = (uint8_t)(g_app_pdm_dma_data[i] >> PDM_OFFSET_16); g_app_pdm_buffer[g_app_pdm_buffer_filled_count++] = (uint8_t)(g_app_pdm_dma_data[i] >> PDM_OFFSET_24); } if (g_app_pdm_buffer_filled_count < CONFIG_PDM_MAX_RECORD_DATA) { continue; } else { osal_printk("The current number of records in PDM exceeds the maximum allowed limit,addr:0x%x\r\n", (uintptr_t)(&g_app_pdm_buffer)); uapi_pdm_stop(); return NULL; } } return NULL; } 信号源为AMIC时按如下配置: void *pdm_amic_task(const char *arg) { unused(arg); dma_channel_t channel; app_pdm_init_pin(CONFIG_ADC_USE_PIN1); app_pdm_init_pin(CONFIG_ADC_USE_PIN2); uapi_adc_init(ADC_CLOCK_NONE); uapi_adc_power_en(AFE_AMIC_MODE, true); uapi_adc_open_differential_channel(ADC_POSTIVE_CHANNEL, ADC_NEGATIVE_CHANNEL); adc_calibration(AFE_AMIC_MODE, true, true, true); /* PDM init. */ uapi_pdm_init(); app_pdm_set_config(); if (uapi_pdm_start() == ERRCODE_SUCC) { osal_printk("pdm start transfer succ!\r\n"); } else { osal_printk("pdm start transfer fail!\r\n"); } uapi_dma_init(); uapi_dma_open(); while (1) { g_dma_trans_done = 0; if (app_pdm_start_dma_transfer(g_app_pdm_dma_data, app_dma_transfer_done_callback, &channel) != 0) { continue; } while (!g_dma_trans_done) { uapi_watchdog_kick(); } uapi_dma_end_transfer(channel); for (uint32_t i = 0; i < CONFIG_PDM_TRANSFER_LEN_BY_DMA; i++) { g_app_pdm_buffer[g_app_pdm_buffer_filled_count++] = (uint8_t)(g_app_pdm_dma_data[i] >> PDM_OFFSET_16); g_app_pdm_buffer[g_app_pdm_buffer_filled_count++] = (uint8_t)(g_app_pdm_dma_data[i] >> PDM_OFFSET_24); } if (g_app_pdm_buffer_filled_count < CONFIG_PDM_MAX_RECORD_DATA_SIZE) { osal_msleep(1); continue; } else { osal_printk("The current number of records in PDM exceeds the maximum allowed limit,addr:0x%x\r\n", (uintptr_t)(&g_app_pdm_buffer)); uapi_pdm_stop(); dma_port_clock_disable(); return NULL; } } return NULL; }
注意事项¶
如果读取FIFO不及时,会出现FIFO full的错误,读取完FIFO后,要写CLR位清除对应的状态。
USB_HID¶
概述¶
USB_HID类是USB设备的一个标准设备类,属于人机交互操作的设备,包括鼠标、键盘等,主要用于人与计算机进行交互。还可用来传输数据、控制设备等,如影像显示设备可能使用HID接口来做亮度、对比度的软件控制,而使用传统的影像接口来传送要显示的数据。USB扩音器可以使用实时传输来播放语音,同时使用HID接口来控制音量等。HID设备可以作为低速、 全速、高速设备用。由于HID设备要求用户输入能得到及时响应,故其传输方式通常采用中断方式。
功能概述¶
HID模块提供的接口及功能如下:
usb_init:初始化USB。
usb_deinit:去初始化USB。
usbd_set_device_info:设置device设备的VID、PID、设备版本号和厂商、产品、序列号字符串信息。
hid_add_report_desc_hid:配置报告描述符信息,设置报告数据格式和功能。
fhid_send_data:鼠标数据发送。
fhid_recv_data: 鼠标数据接收,最大接收长度为64字节。为阻塞式接口,需要独自起一个线程调用。
KCONFIG配置¶
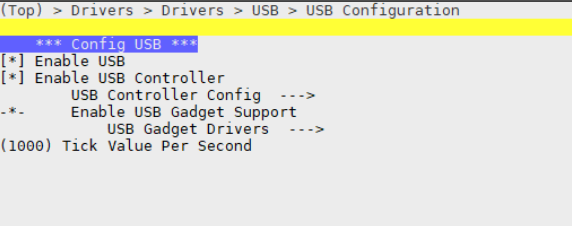

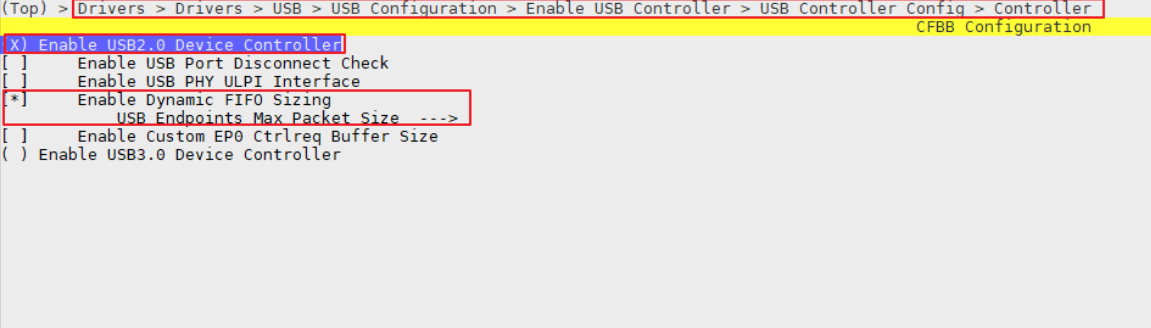

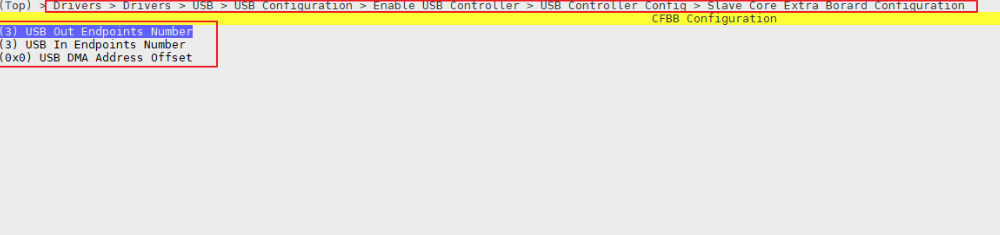



开发指引¶
示例:
配置报告描述符信息,设置报告数据格式和功能。
int tesetsuit_usb_set_report_desc_hid(void) { return hid_add_report_descriptor(g_report_desc_hid, sizeof(g_report_desc_hid), 0); }
g_report_desc_hid为报告描述符,返回值为描述符的索引,用在“4”中的发送接口里。
首先配置device设备的VID、 PID、设备版本号和厂商、产品、序列号字符串信息。
const char manufacturer[TEST_USB_MANUFACTURER_LEN] = TEST_USB_MANUFACTURER; /* 厂商ID */ struct device_string str_manufacturer = { .str = manufacturer, .len = TEST_USB_MANUFACTURER_LEN /* 厂商ID长度 */ }; const char product[TEST_USB_PRODUCT_LEN] = TEST_USB_PRODUCT; /* 产品ID */ struct device_string str_product = { .str = product, .len = TEST_USB_PRODUCT_LEN /* 产品ID长度 */ }; const char serial[TEST_USB_SERIAL_LEN] = TEST_USB_SERIAL; /* 序列号 */ struct device_string str_serial_number = { .str = serial, .len = TEST_USB_SERIAL_LEN /* 序列号长度 */ }; struct device_id dev_id = { .vendor_id = 0x1111, /* VID */ .product_id = 0x0009, /* PID */ .release_num = 0x0800 /* 版本号 */ }; if (usbd_set_device_info(dtype, &str_manufacturer, &str_product, &str_serial_number, dev_id) != 0) { test_suite_log_stringf("set device info fail!\n"); return TEST_SUITE_TEST_FAILED; }
USB初始化。device type为DEV_HID。
if (usb_init(DEVICE, dtype) != 0) { test_suite_log_stringf("usb_init failed!\n"); return TEST_SUITE_TEST_FAILED; }
发送鼠标数据。这里以SOF中断中发送数据举例,也可自行调用发送数据的接口。
uint8_t g_mouse_init_flag = 0; void usb_sof_intr_callback(void) { if (g_mouse_init_flag == 0) { return; } static uint8_t usb_sof_cnt = 0; usb_sof_cnt = (usb_sof_cnt + 1) % g_usb_mouse_polling_rate; if (usb_sof_cnt != 0) { return; } int16_t x = 0; int16_t y = 0; g_usb_hid_hs_mouse_operator.get_xy(&x, &y); g_send_mouse_msg.x = x; g_send_mouse_msg.y = y; fhid_send_data(g_mouse_index, (char *)&g_send_mouse_msg, USB_MOUSE_REPORTER_LEN); }
由于数据接收接口为阻塞式接口,因此接收host数据。需要新起一个线程,在线程里执行数据接收操作,fhid_recv_data返回值为实际接收数据的长度,当返回值为负数时表示当前设备未连接、参数有误或者设备断连。
下述样例为:接收host发送的数据,判断数据是否为切换至dfu设备的命令,如果是则执行去初始化再初始化为dfu设备(dfu设备一般做升级用,详见USB_DFU章节)
osal_kthread_create(usb_recv_task, NULL, "lcd_task", USB_RECV_STACK_SIZE); // 起线程 int usb_recv_task(void *para) // 数据接收线程 { UNUSED(para); uint8_t recv_data[RECV_MAX_LENGTH]; for (;;) { int32_t ret = fhid_recv_data(tesetsuit_usb_get_hid_index(), (char*)recv_data, RECV_MAX_LENGTH); // 接收数据 if (ret <= 0) { osDelay(USB_RECV_TASK_DELAY); continue; } if (ret == RECV_MAX_LENGTH && recv_data[0] == CUSTUMER_PAGE_REPORT_ID) { // 判断接收数据类型 seboot_switch_dfu_t command; if (memcpy_s(&command, sizeof(seboot_switch_dfu_t), &recv_data[1], RECV_MAX_LENGTH - 1) != EOK) { continue; } osal_printk("start_flag:%x\r\n", command.start_flag); osal_printk("packet_size:%x\r\n", command.packet_size); osal_printk("frame_type:%x\r\n", command.frame_type); osal_printk("frame_type_reserve:%x\r\n", command.frame_type_reserve); osal_printk("flag:%x\r\n", command.flag); osal_printk("check_sum:%x\r\n", command.check_sum); if (command.frame_type == SWITCH_TO_DFU_FLAG) { osal_printk("start dfu\n"); usb_deinit(); usb_dfu_init(); // 初始化为dfu设备,详见USB_DFU章节 break; } } } osal_printk("usb recv task over\n"); return 0; }
注意事项¶
HID报告描述符配置后返回的索引一定要和发送数据接口的第一个参数保持一致,并且发送数据的格式是根据报告描述符定义的,也需要保持一致。
host下发的数据的第一个字节需要同报告描述符描述的report_id一致,字节长度也需和报告描述符描述一致。
USB_DFU¶
概述¶
USB DFU设备全称为Device Firmware Upgrade设备固件更新,支持从host处接收新固件做升级。
功能概述¶
DFU设备类型为通用串行总线设备,支持从host处接收大量数据,一般做设备升级用。
KCONFIG配置¶
暂无。
开发指引¶
配置device设备的VID、 PID、设备版本号和厂商、产品、序列号字符串信息。
#define DFU_MANUFACTURER { 'H', 0, 'H', 0, 'H', 0, 'H', 0, 'l', 0, 'i', 0, 'c', 0, 'o', 0, 'n', 0 } #define DFU_MANUFACTURER_LEN 20 #define DFU_PRODUCT { 'H', 0, 'H', 0, '6', 0, '6', 0, '6', 0, '6', 0, ' ', 0, 'U', 0, 'S', 0, 'B', 0 } #define DFU_PRODUCT_LEN 22 #define DFU_SERIAL { '2', 0, '0', 0, '2', 0, '0', 0, '0', 0, '6', 0, '2', 0, '4', 0 } #define DFU_SERIAL_LEN 16 int usb_dfu_init(void) { int ret; const char manufacturer[DFU_MANUFACTURER_LEN] = DFU_MANUFACTURER; struct device_string str_manufacturer = { .str = manufacturer, .len = DFU_MANUFACTURER_LEN }; const char product[DFU_PRODUCT_LEN] = DFU_PRODUCT; struct device_string str_product = { .str = product, .len = DFU_PRODUCT_LEN }; const char serial[DFU_SERIAL_LEN] = DFU_SERIAL; struct device_string str_serial_number = { .str = serial, .len = DFU_SERIAL_LEN }; struct device_id dev_id = { .vendor_id = 0x1111, .product_id = 0xa, .release_num = 0x0119 }; ret = usbd_set_device_info(DEV_DFU, &str_manufacturer, &str_product, &str_serial_number, dev_id); // 配置设备类型和设备信息 if (ret != 0) { osal_printk("set device info fail!\n"); return -1; } ret = usb_init(DEVICE, DEV_DFU); // usb初始化为dfu设备 if (ret != 0) { osal_printk("usb_init failed!\n"); return -1; } return 0; }
数据接收和处理。
usb_dfu_download_callback(const uint8_t *buf, uint32_t len)为dfu设备数据接收的回调函数,当设备接收到数据时会自动调用此函数,参数表示数据地址和长度,下述示例为dfu升级流程:
void usb_dfu_download_callback(const uint8_t *buf, uint32_t len) { static bool is_pack_header = true; if (buf == NULL || len == 0) { printf("upgrade done\r\n"); // 数据接收完成 return; } if (is_pack_header) { dfu_packge_header_t *head = (dfu_packge_header_t *)buf; osal_printk("is_pack_header:%x\r\n", is_pack_header); osal_printk("start_flag:%x\r\n", head->start_flag); osal_printk("packet_size:%x\r\n", head->packet_size); osal_printk("frame_type:%x\r\n", head->frame_type); osal_printk("frame_type_reverse:%x\r\n", head->frame_type_reverse); osal_printk("file_addr:%x\r\n", head->file_addr); osal_printk("file_len:%x\r\n", head->file_len); osal_printk("erase_size:%x\r\n", head->erase_size); osal_printk("formal:%x\r\n", head->formal); osal_printk("formal_reverse:%x\r\n", head->formal_reverse); osal_printk("checksum:%x\r\n", head->checksum); is_pack_header = false; return; } osal_printk(" buf:"); for (int i = 0; i < DFU_SERIAL_LEN; i++) { osal_printk("%x ", buf[i]); } osal_printk("\n"); uapi_eflash_erase((uint32_t)g_dfu_data, len); // 将g_dfu_data处起始的flash空间清除len个字节 uapi_eflash_write((uint32_t)g_dfu_data, (uint32_t *)(uintptr_t)buf, len); // 将接收到的数据写入flash g_dfu_write_len += len; if (uapi_crc16(0, buf, len) != uapi_crc16(0, (uint8_t *)(g_dfu_data + EMBED_FLASH_START), len)) { // 验证写入flash后的数据和接收的数据一致 osal_printk("check fail!\r\n"); uapi_eflash_erase(FRAME_DOWNLOAD_OFFSET, g_dfu_write_len); cpu_utils_reset_chip_with_log((cores_t)APPS, REBOOT_CAUSE_APPLICATION_SYSRESETREQ); } for (int i = 0; i < DFU_SERIAL_LEN; i++) { osal_printk("%x ", *(char *)(g_dfu_data + EMBED_FLASH_START + i)); } osal_printk("\ng_dfu_write_len:%u \n", g_dfu_write_len); g_dfu_data += len; }
注意事项¶
USB在切换为DFU设备后其他功能无法正常使用,比如原先是HID鼠标设备,切换为DFU设备做升级时鼠标功能不会生效。
DFU设备和正常功能的设备的PID不能一样,例如:如果HID鼠标设备,PID为0x9, 在切换为DFU设备做升级时需要配置DFU设备的PID不等于0x9,否则在切换为DFU设备后host任会将设备识别成HID鼠标设备而不时DFU设备。
I2S¶
概述¶
I2S(Inter-IC Sound, Integrated Interchip Sound,或简写IIS),是一种数字音频传输标准,用于数字音频数据在系统内部器件之间传输,例如编解码器 CODEC、DSP、数字输入/输出接口、ADC、DAC 和数字滤波器等。I2S是一个简单的数字接口协议,没有地址或设备选择机制,只能同时存在一个主设备和发送设备。在 I2S 总线上,提供时钟(SCK 和 WS)的设备为主设备。 I2S主要是通过SIO(Serial Input&Output)串行输入输出模块实现其功能,SIO接口支持I2S模式,I2S接口通常用于高保真音频应用,如音频播放器、音频录制设备和音频处理器等。
I2S总线包含四条线:时钟信号SCK,左右声道选择信号WS,数据输入信号DI,数据输出信号DO。
产品仅提供了I2S0这一组支持Master/Slaver模式的I2S外设,I2S规格如下:
支持两种操作模式,主模式和从模式,主模式SCK需要模块内部自己产生,而从模式由外部提供。
支持位宽为32bit×8的FIFO。
功能描述¶
I2S模块提供的接口及功能如下:
uapi_i2s_init(sio_bus_t bus, i2s_callback_t callback):初始化该I2S模块(bus表示当前使用的I2S bus总线,callback表示I2S设备的回调函数)。
uapi_i2s_deinit(sio_bus_t bus):去初始化I2S模块(bus表示当前使用的I2S bus总线)。
uapi_i2s_set_config(sio_bus_t bus, const i2s_config_t *config):设置I2S设备的配置信息(bus表示当前使用的I2S bus总线,config表示I2S设备的配置信息)。
uapi_i2s_get_config(sio_bus_t bus, i2s_config_t *config):获取I2S设备的配置信息(bus表示当前使用的I2S bus总线,config表示I2S设备的配置信息)。
uapi_i2s_write_data(sio_bus_t bus, i2s_tx_data_t *data):I2S发送数据(bus表示当前使用的I2S bus总线,data表示I2S需要发送的数据)。
uapi_i2s_read_start(sio_bus_t bus):I2S rx使能,开始接收数据(bus表示当前使用的I2S bus总线)。
uapi_i2s_loopback(sio_bus_t bus, bool en):设置I2S回环自测模式(bus表示当前使用的I2S bus总线,en表示是否配置I2S回环自测模式)。(打开CONFIG_I2S_SUPPORT_LOOPBACK宏才能使用)
uapi_i2s_loop_trans(sio_bus_t bus, i2s_tx_data_t *data):开启I2S回环自测(bus表示当前使用的I2S bus总线,data表示I2S的数据传输配置)。
uapi_i2s_dma_config(sio_bus_t bus, i2s_dma_attr_t *i2s_dma_cfg):配置I2S DMA传输参数(bus表示当前使用的I2S bus总线,i2s_dma_cfg表示I2S DMA传输时的配置参数)。(打开CONFIG_I2S_SUPPORT_DMA宏才能使用)
uapi_i2s_merge_write_by_dma(sio_bus_t bus, const void *buffer, uint32_t length, i2s_dma_config_t *dma_cfg, uintptr_t arg, bool block):merge模式下I2S通过DMA写数据(bus表示当前使用的I2S bus总线,buffer表示I2S需要发送的数据,length表示发送数据的长度,dma_cfg表示I2S DMA传输时的配置参数,arg表示自定义参数指针,可被传递到中断处理函数,block表示阻塞传输还是非阻塞)。(打开CONFIG_I2S_SUPPORT_DMA宏才能使用)
uapi_i2s_merge_read_by_dma(sio_bus_t bus, const void *buffer, uint32_t length, i2s_dma_config_t *dma_cfg, uintptr_t arg, bool block):merge模式下I2S通过DMA读数据(bus表示当前使用的I2S bus总线,buffer表示I2S读取数据缓冲区,length表示读取数据的长度,dma_cfg表示I2S DMA传输时的配置参数,arg表示自定义参数指针,可被传递到中断处理函数,block表示阻塞传输还是非阻塞)。(打开CONFIG_I2S_SUPPORT_DMA宏才能使用)
KCONFIG配置¶
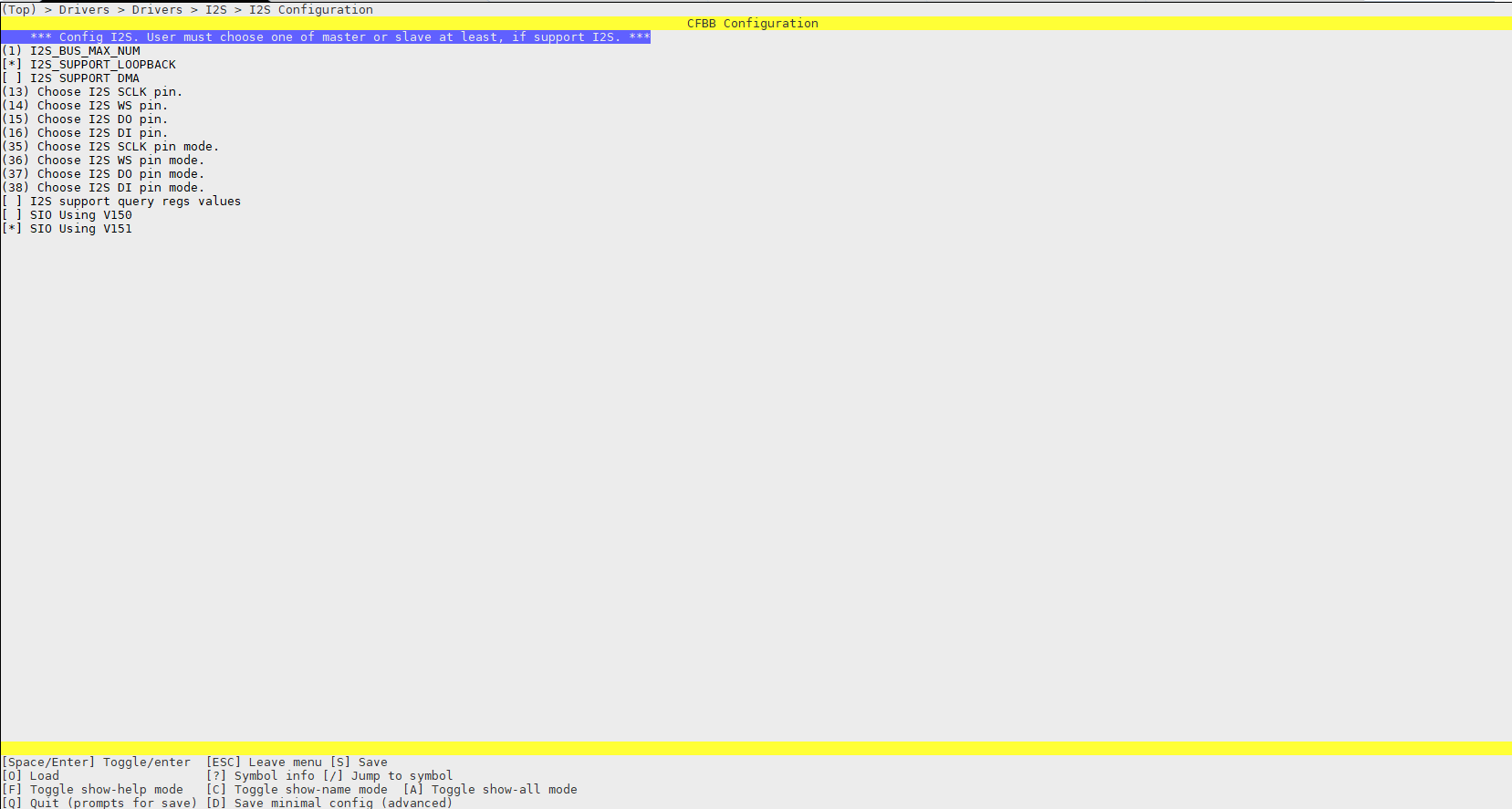
配置宏具体描述如表1所示。
表 1 I2S相关宏描述
开发指引¶
I2S用于对接支持I2S协议的设备,I2S单元可以作为主设备或从设备。以I2S单元作为主设备为例:
通过调用sio_porting_i2s_pinmux接口,进行IO复用,将用到的管脚复用为I2S功能。
调用uapi_i2s_init以及uapi_i2s_set_config接口,初始化I2S资源,此处以初始化I2S主机为例:
void sample_i2s_init(void) { i2s_config_t config = { .drive_mode= MASTER, .transfer_mode = STD_MODE, .data_width = TWENTY_FOUR_BIT, .channels_num = TWO_CH, .timing = NONE_TIMING_MODE, .clk_edge = RISING_EDGE, .div_number = I2S_DIV_NUM, .number_of_channels = I2S_NUMBER_OF_CHANNELS, }; /* 设置 i2s pinmux */ sio_porting_i2s_pinmux(); /* 设置 i2s pinmux */ /* 初始化 i2s0 */ uapi_i2s_init(SIO_BUS_0, app_i2s_rx_callback); uapi_i2s_set_config(SIO_BUS_0, &config); }
调用uapi_i2s_write_data接口,实现主机发送数据。
errcode_t sample_i2s_write(i2s_tx_data_t *data) { return uapi_i2s_write_data(SIO_BUS_0, &data); /* 发送数据 */ }
I2S DMA主从收发完整代码流程可参考以下代码:
#include "i2s.h"
#include "watchdog.h"
#include "hal_sio.h"
#include "hal_dma.h"
#include "soc_osal.h"
#include "app_init.h"
#define I2S_DIV_NUMBER 32
#define I2S_CHANNEL_NUMBER 2
#define I2S_TX_INT_THRESHOLD 7
#define I2S_RX_INT_THRESHOLD 1
#define I2S_DMA_SRC_WIDTH 2
#define I2S_DMA_DEST_WIDTH 2
#define I2S_DMA_BURST_LENGTH 0
#define I2S_DMA_TRANS_STEP 2
#define I2S_TASK_PRIO 24
#define I2S_TASK_STACK_SIZE 0xc00
static uint32_t g_i2s_first_data = 0x10000000; /* 32 bits */
static uint32_t g_i2s_send_dma_data[CONFIG_I2S_TRANSFER_LEN_OF_DMA] = { 0 };
static void *i2s_dma_master_task(const char *arg)
{
unused(arg);
int32_t ret = CONFIG_I2S_TRANSFER_LEN_OF_DMA;
#if defined(CONFIG_SIO_USING_V151)
ret = ERRCODE_SUCC;
#endif
uapi_i2s_deinit(SIO_BUS_0);
uapi_dma_deinit();
uapi_i2s_init(SIO_BUS_0, NULL);
sio_porting_i2s_pinmux();
i2s_config_t config = {
.drive_mode= MASTER,
.transfer_mode = STD_MODE,
.data_width = THIRTY_TWO_BIT,
.channels_num = TWO_CH,
.timing = NONE_TIMING_MODE,
.clk_edge = RISING_EDGE,
.div_number = I2S_DIV_NUMBER,
.number_of_channels = I2S_CHANNEL_NUMBER,
};
i2s_dma_attr_t attr = {
.tx_dma_enable = 1,
.tx_int_threshold = I2S_TX_INT_THRESHOLD,
.rx_dma_enable = 0,
.rx_int_threshold = I2S_RX_INT_THRESHOLD,
};
i2s_dma_config_t dma_cfg = {
.src_width = I2S_DMA_SRC_WIDTH,
.dest_width = I2S_DMA_DEST_WIDTH,
.burst_length = I2S_DMA_BURST_LENGTH,
.priority = 0,
};
uapi_i2s_set_config(SIO_BUS_0, &config);
uapi_i2s_dma_config(SIO_BUS_0, &attr);
for (uint32_t i = 0; i < CONFIG_I2S_TRANSFER_LEN_OF_DMA; i += I2S_DMA_TRANS_STEP) {
g_i2s_send_dma_data[i] = g_i2s_first_data;
g_i2s_send_dma_data[i + 1] = g_i2s_first_data;
g_i2s_first_data++;
}
/* DMA init. */
uapi_dma_init();
uapi_dma_open();
osal_printk("DMA master transfer start.\r\n");
while (1) {
uapi_watchdog_kick();
if (uapi_i2s_merge_write_by_dma(SIO_BUS_0, &g_i2s_send_dma_data, CONFIG_I2S_TRANSFER_LEN_OF_DMA, &dma_cfg,
(uintptr_t)NULL, true) != ret) {
osal_printk("master uapi_i2s_merge_write_by_dma error.\r\n");
}
}
return NULL;
}
static void i2s_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2s_dma_master_task, 0, "I2sDmaMasterTask",
I2S_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2S_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2s_entry. */
app_run(i2s_entry);
-----------------------------------------------------------------
#include "i2s.h"
#include "watchdog.h"
#include "hal_sio.h"
#include "hal_dma.h"
#include "soc_osal.h"
#include "app_init.h"
#define I2S_DIV_NUMBER 32
#define I2S_CHANNEL_NUMBER 2
#define I2S_TX_INT_THRESHOLD 7
#define I2S_RX_INT_THRESHOLD 1
#define I2S_DMA_TRANSFER_EVENT 1
#define I2S_RING_BUFFER_NUMBER 4
#define I2S_TASK_PRIO 24
#define I2S_TASK_STACK_SIZE 0xc00
static uint32_t g_i2s_dma_data0[CONFIG_I2S_TRANSFER_LEN_OF_DMA] = { 0 };
static uint32_t g_i2s_dma_data1[CONFIG_I2S_TRANSFER_LEN_OF_DMA] = { 0 };
static uint32_t g_i2s_dma_data2[CONFIG_I2S_TRANSFER_LEN_OF_DMA] = { 0 };
static uint32_t g_i2s_dma_data3[CONFIG_I2S_TRANSFER_LEN_OF_DMA] = { 0 };
static uint32_t *g_i2s_dma_data[I2S_RING_BUFFER_NUMBER] = {
g_i2s_dma_data0, g_i2s_dma_data1, g_i2s_dma_data2, g_i2s_dma_data3};
static uint8_t g_read_buffer_state = 0;
static osal_event g_i2s_dma_id;
static void i2s_dma_transfer_restart(void);
static int32_t i2s_start_dma_transfer(uint32_t *i2s_buffer, dma_transfer_cb_t trans_done)
{
dma_ch_user_peripheral_config_t transfer_config;
uint8_t channel = 0;
transfer_config.src = i2s_porting_rx_merge_data_addr_get(SIO_BUS_0);
transfer_config.dest = (uint32_t)(uintptr_t)i2s_buffer;
transfer_config.transfer_num = (uint16_t)CONFIG_I2S_TRANSFER_LEN_OF_DMA;
transfer_config.src_handshaking = HAL_DMA_HANDSHAKING_I2S_RX;
transfer_config.dest_handshaking = 0;
transfer_config.trans_type = HAL_DMA_TRANS_PERIPHERAL_TO_MEMORY_DMA;
transfer_config.trans_dir = HAL_DMA_TRANSFER_DIR_PERIPHERAL_TO_MEM;
transfer_config.priority = 0;
transfer_config.src_width = HAL_DMA_TRANSFER_WIDTH_32;
transfer_config.dest_width = HAL_DMA_TRANSFER_WIDTH_32;
transfer_config.burst_length = 0;
transfer_config.src_increment = HAL_DMA_ADDRESS_INC_NO_CHANGE;
transfer_config.dest_increment = HAL_DMA_ADDRESS_INC_INCREMENT;
transfer_config.protection = HAL_DMA_PROTECTION_CONTROL_BUFFERABLE;
errcode_t ret = uapi_dma_configure_peripheral_transfer_single(&transfer_config, &channel,
trans_done, (uintptr_t)NULL);
if (ret != ERRCODE_SUCC) {
osal_printk("%s Configure the DMA fail. %x\r\n", "i2s dma", ret);
return 1;
}
ret = uapi_dma_start_transfer(channel);
if (ret != ERRCODE_SUCC) {
osal_printk("%s Start the DMA fail. %x\r\n", "i2s dma", ret);
return 1;
}
hal_sio_set_rx_enable(SIO_BUS_0, 1);
return 0;
}
static void i2s_dma_trans_done_callback(uint8_t intr, uint8_t channel, uintptr_t arg)
{
unused(channel);
unused(arg);
switch (intr) {
case HAL_DMA_INTERRUPT_TFR:
i2s_dma_transfer_restart();
break;
case HAL_DMA_INTERRUPT_ERR:
osal_printk("i2s DMA transfer error.\r\n");
break;
default:
break;
}
}
static void i2s_dma_transfer_restart(void)
{
g_read_buffer_state = (g_read_buffer_state + 1) % I2S_RING_BUFFER_NUMBER;
if (osal_event_write(&g_i2s_dma_id, I2S_DMA_TRANSFER_EVENT) != OSAL_SUCCESS) {
osal_printk("osal_event_write fail!\r\n");
return;
}
if (i2s_start_dma_transfer(g_i2s_dma_data[g_read_buffer_state], i2s_dma_trans_done_callback) != 0) {
return;
}
}
static void *i2s_dma_slave_task(const char *arg)
{
unused(arg);
if (osal_event_init(&g_i2s_dma_id) != OSAL_SUCCESS) {
return NULL;
}
uapi_i2s_deinit(SIO_BUS_0);
uapi_dma_deinit();
uapi_i2s_init(SIO_BUS_0, NULL);
sio_porting_i2s_pinmux();
i2s_config_t config = {
.drive_mode= SLAVE,
.transfer_mode = STD_MODE,
.data_width = THIRTY_TWO_BIT,
.channels_num = TWO_CH,
.timing = NONE_TIMING_MODE,
.clk_edge = RISING_EDGE,
.div_number = I2S_DIV_NUMBER,
.number_of_channels = I2S_CHANNEL_NUMBER,
};
i2s_dma_attr_t attr = {
.tx_dma_enable = 0,
.tx_int_threshold = I2S_TX_INT_THRESHOLD,
.rx_dma_enable = 1,
.rx_int_threshold = I2S_RX_INT_THRESHOLD,
};
uapi_i2s_set_config(SIO_BUS_0, &config);
uapi_i2s_dma_config(SIO_BUS_0, &attr);
/* DMA init. */
uapi_dma_init();
uapi_dma_open();
if (i2s_start_dma_transfer(g_i2s_dma_data[g_read_buffer_state], i2s_dma_trans_done_callback) != 0) {
return NULL;
}
osal_printk("DMA slave receive start.\r\n");
while (1) {
if (!(osal_event_read(&g_i2s_dma_id, I2S_DMA_TRANSFER_EVENT, OSAL_WAIT_FOREVER,
OSAL_WAITMODE_AND | OSAL_WAITMODE_CLR))) {
uapi_watchdog_kick();
continue;
}
}
return NULL;
}
static void i2s_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2s_dma_slave_task, 0, "I2sDmaSlaveTask",
I2S_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2S_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2s_entry. */
app_run(i2s_entry);
I2S DMA循环链表主从收发完整代码流程可参考以下代码(此处slave端使用DMA循环链表完全接收数据):
#include "i2s.h"
#include "watchdog.h"
#include "hal_sio.h"
#include "hal_dma.h"
#include "soc_osal.h"
#include "app_init.h"
#include "dma.h"
#define I2S_DIV_NUMBER 32
#define I2S_CHANNEL_NUMBER 2
#define I2S_TX_INT_THRESHOLD 7
#define I2S_RX_INT_THRESHOLD 1
#define I2S_DMA_SRC_WIDTH 2
#define I2S_DMA_DEST_WIDTH 2
#define I2S_DMA_BURST_LENGTH 0
#define I2S_DMA_TRANS_STEP 2
#define I2S_TASK_PRIO 24
#define I2S_TASK_STACK_SIZE 0xc00
static uint32_t g_i2s_first_data = 0x10000000; /* 32 bits */
static uint32_t g_i2s_send_dma_data[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static void *i2s_dma_master_task(const char *arg)
{
unused(arg);
int32_t ret = CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI;
#if defined(CONFIG_SIO_USING_V151)
ret = ERRCODE_SUCC;
#endif
uapi_i2s_deinit(SIO_BUS_0);
uapi_i2s_init(SIO_BUS_0, NULL);
sio_porting_i2s_pinmux();
i2s_config_t config = {
.drive_mode= MASTER,
.transfer_mode = STD_MODE,
.data_width = THIRTY_TWO_BIT,
.channels_num = TWO_CH,
.timing = NONE_TIMING_MODE,
.clk_edge = RISING_EDGE,
.div_number = I2S_DIV_NUMBER,
.number_of_channels = I2S_CHANNEL_NUMBER,
};
i2s_dma_attr_t attr = {
.tx_dma_enable = 1,
.tx_int_threshold = I2S_TX_INT_THRESHOLD,
.rx_dma_enable = 0,
.rx_int_threshold = I2S_RX_INT_THRESHOLD,
};
i2s_dma_config_t dma_cfg = {
.src_width = I2S_DMA_SRC_WIDTH,
.dest_width = I2S_DMA_DEST_WIDTH,
.burst_length = I2S_DMA_BURST_LENGTH,
.priority = 0,
};
uapi_i2s_set_config(SIO_BUS_0, &config);
uapi_i2s_dma_config(SIO_BUS_0, &attr);
for (uint32_t i = 0; i < CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI; i += I2S_DMA_TRANS_STEP) {
g_i2s_send_dma_data[i] = g_i2s_first_data;
g_i2s_send_dma_data[i + 1] = g_i2s_first_data;
g_i2s_first_data++;
}
/* DMA init. */
uapi_dma_init();
uapi_dma_open();
osal_printk("DMA master transfer start.\r\n");
while (1) {
uapi_watchdog_kick();
if (uapi_i2s_merge_write_by_dma(SIO_BUS_0, &g_i2s_send_dma_data, CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI, &dma_cfg,
(uintptr_t)NULL, true) != ret) {
osal_printk("master uapi_i2s_merge_write_by_dma error.\r\n");
}
}
return NULL;
}
static void i2s_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2s_dma_master_task, 0, "I2sDmaMasterTask",
I2S_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2S_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2s_entry. */
app_run(i2s_entry);
#include "i2s.h"
#include "watchdog.h"
#include "hal_sio.h"
#include "hal_dma.h"
#include "soc_osal.h"
#include "app_init.h"
#include "dma.h"
#define I2S_DIV_NUMBER 32
#define I2S_CHANNEL_NUMBER 2
#define I2S_TX_INT_THRESHOLD 7
#define I2S_RX_INT_THRESHOLD 1
#define I2S_DMA_SRC_WIDTH 2
#define I2S_DMA_DEST_WIDTH 2
#define I2S_DMA_BURST_LENGTH 0
#define I2S_DMA_TRANS_STEP 2
#define I2S_TASK_PRIO 24
#define I2S_TASK_STACK_SIZE 0xc00
static uint32_t g_i2s_first_data = 0x10000000; /* 32 bits */
static uint32_t g_i2s_send_dma_data[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static void *i2s_dma_master_task(const char *arg)
{
unused(arg);
int32_t ret = CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI;
#if defined(CONFIG_SIO_USING_V151)
ret = ERRCODE_SUCC;
#endif
uapi_i2s_deinit(SIO_BUS_0);
uapi_i2s_init(SIO_BUS_0, NULL);
sio_porting_i2s_pinmux();
i2s_config_t config = {
.drive_mode= MASTER,
.transfer_mode = STD_MODE,
.data_width = THIRTY_TWO_BIT,
.channels_num = TWO_CH,
.timing = NONE_TIMING_MODE,
.clk_edge = RISING_EDGE,
.div_number = I2S_DIV_NUMBER,
.number_of_channels = I2S_CHANNEL_NUMBER,
};
i2s_dma_attr_t attr = {
.tx_dma_enable = 1,
.tx_int_threshold = I2S_TX_INT_THRESHOLD,
.rx_dma_enable = 0,
.rx_int_threshold = I2S_RX_INT_THRESHOLD,
};
i2s_dma_config_t dma_cfg = {
.src_width = I2S_DMA_SRC_WIDTH,
.dest_width = I2S_DMA_DEST_WIDTH,
.burst_length = I2S_DMA_BURST_LENGTH,
.priority = 0,
};
uapi_i2s_set_config(SIO_BUS_0, &config);
uapi_i2s_dma_config(SIO_BUS_0, &attr);
for (uint32_t i = 0; i < CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI; i += I2S_DMA_TRANS_STEP) {
g_i2s_send_dma_data[i] = g_i2s_first_data;
g_i2s_send_dma_data[i + 1] = g_i2s_first_data;
g_i2s_first_data++;
}
/* DMA init. */
uapi_dma_init();
uapi_dma_open();
osal_printk("DMA master transfer start.\r\n");
while (1) {
uapi_watchdog_kick();
if (uapi_i2s_merge_write_by_dma(SIO_BUS_0, &g_i2s_send_dma_data, CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI, &dma_cfg,
(uintptr_t)NULL, true) != ret) {
osal_printk("master uapi_i2s_merge_write_by_dma error.\r\n");
}
}
return NULL;
}
static void i2s_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2s_dma_master_task, 0, "I2sDmaMasterTask",
I2S_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2S_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2s_entry. */
app_run(i2s_entry);
---------------------------------------------------------------------
#include "i2s.h"
#include "watchdog.h"
#include "hal_sio.h"
#include "hal_dma.h"
#include "soc_osal.h"
#include "app_init.h"
#include "dma.h"
#define I2S_DIV_NUMBER 32
#define I2S_CHANNEL_NUMBER 2
#define I2S_TX_INT_THRESHOLD 7
#define I2S_RX_INT_THRESHOLD 1
#define I2S_DMA_TRANSFER_EVENT 1
#define I2S_RING_BUFFER_NUMBER 4
#define I2S_DMA_DATA_CMP_MIDDLE 9
#define I2S_DMA_DATA_CMP_END (CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI - 1)
#define I2S_TASK_PRIO 24
#define I2S_TASK_STACK_SIZE 0xc00
static uint32_t g_i2s_dma_data0[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static uint32_t g_i2s_dma_data1[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static uint32_t g_i2s_dma_data2[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static uint32_t g_i2s_dma_data3[CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI] = { 0 };
static uint32_t *g_i2s_dma_data[I2S_RING_BUFFER_NUMBER] = {
g_i2s_dma_data0, g_i2s_dma_data1, g_i2s_dma_data2, g_i2s_dma_data3};
static osal_event g_i2s_dma_id;
static uint8_t g_transfer_err_flag = 0;
static uint32_t g_cb_count = 0;
static int32_t i2s_add_dma_lli_node(uint8_t index, dma_channel_t dma_channel, dma_transfer_cb_t trans_done)
{
dma_ch_user_peripheral_config_t transfer_config;
transfer_config.src = i2s_porting_rx_merge_data_addr_get(SIO_BUS_0);
transfer_config.dest = (uint32_t)(uintptr_t)g_i2s_dma_data[index];
transfer_config.transfer_num = (uint16_t)CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI;
transfer_config.src_handshaking = HAL_DMA_HANDSHAKING_I2S_RX;
transfer_config.dest_handshaking = 0;
transfer_config.trans_type = HAL_DMA_TRANS_PERIPHERAL_TO_MEMORY_DMA;
transfer_config.trans_dir = HAL_DMA_TRANSFER_DIR_PERIPHERAL_TO_MEM;
transfer_config.priority = 0;
transfer_config.src_width = HAL_DMA_TRANSFER_WIDTH_32;
transfer_config.dest_width = HAL_DMA_TRANSFER_WIDTH_32;
transfer_config.burst_length = 0;
transfer_config.src_increment = HAL_DMA_ADDRESS_INC_NO_CHANGE;
transfer_config.dest_increment = HAL_DMA_ADDRESS_INC_INCREMENT;
transfer_config.protection = HAL_DMA_PROTECTION_CONTROL_BUFFERABLE;
errcode_t ret = uapi_dma_configure_peripheral_transfer_lli(dma_channel, &transfer_config, trans_done);
if (ret != ERRCODE_SUCC) {
osal_printk("%s Configure the DMA fail. %x\r\n", "i2s dma lli", ret);
return 1;
}
return 0;
}
void app_printf_err(void)
{
if (g_cb_count >= I2S_RING_BUFFER_NUMBER && g_transfer_err_flag)
{
if ((g_i2s_dma_data0[0] == g_i2s_dma_data1[0]) && (g_i2s_dma_data1[0] == g_i2s_dma_data2[0]) &&
(g_i2s_dma_data2[0] == g_i2s_dma_data3[0]) &&
(g_i2s_dma_data0[I2S_DMA_DATA_CMP_MIDDLE] == g_i2s_dma_data1[I2S_DMA_DATA_CMP_MIDDLE]) &&
(g_i2s_dma_data1[I2S_DMA_DATA_CMP_MIDDLE] == g_i2s_dma_data2[I2S_DMA_DATA_CMP_MIDDLE]) &&
(g_i2s_dma_data2[I2S_DMA_DATA_CMP_MIDDLE] == g_i2s_dma_data3[I2S_DMA_DATA_CMP_MIDDLE]) &&
(g_i2s_dma_data0[I2S_DMA_DATA_CMP_END] == g_i2s_dma_data1[I2S_DMA_DATA_CMP_END]) &&
(g_i2s_dma_data1[I2S_DMA_DATA_CMP_END] == g_i2s_dma_data2[I2S_DMA_DATA_CMP_END]) &&
(g_i2s_dma_data2[I2S_DMA_DATA_CMP_END] == g_i2s_dma_data3[I2S_DMA_DATA_CMP_END]))
{
osal_printk("recv OK\r\n");
} else {
for (uint32_t j = 0; j < I2S_RING_BUFFER_NUMBER; j++) {
for (uint32_t i = 0; i < CONFIG_I2S_TRANSFER_LEN_OF_DMA_LLI; i += 2) {
osal_printk("%d, %d ~ %x\r\n", j, i, g_i2s_dma_data[j][i]);
}
}
}
g_transfer_err_flag = 0;
}
}
static void i2s_dma_trans_done_callback(uint8_t intr, uint8_t channel, uintptr_t arg)
{
unused(channel);
unused(arg);
switch (intr) {
case HAL_DMA_INTERRUPT_TFR:
g_cb_count++;
if (g_cb_count >= I2S_RING_BUFFER_NUMBER) {
g_transfer_err_flag = 1;
}
if (osal_event_write(&g_i2s_dma_id, I2S_DMA_TRANSFER_EVENT) != OSAL_SUCCESS) {
osal_printk("osal_event_write fail!\r\n");
return;
}
break;
case HAL_DMA_INTERRUPT_ERR:
osal_printk("i2s DMA transfer error.\r\n");
break;
default:
break;
}
}
static void *i2s_dma_slave_task(const char *arg)
{
unused(arg);
if (osal_event_init(&g_i2s_dma_id) != OSAL_SUCCESS) {
return NULL;
}
uapi_i2s_deinit(SIO_BUS_0);
uapi_i2s_init(SIO_BUS_0, NULL);
sio_porting_i2s_pinmux();
i2s_config_t config = {
.drive_mode= SLAVE,
.transfer_mode = STD_MODE,
.data_width = THIRTY_TWO_BIT,
.channels_num = TWO_CH,
.timing = NONE_TIMING_MODE,
.clk_edge = RISING_EDGE,
.div_number = I2S_DIV_NUMBER,
.number_of_channels = I2S_CHANNEL_NUMBER,
};
i2s_dma_attr_t attr = {
.tx_dma_enable = 0,
.tx_int_threshold = I2S_TX_INT_THRESHOLD,
.rx_dma_enable = 1,
.rx_int_threshold = I2S_RX_INT_THRESHOLD,
};
uapi_i2s_set_config(SIO_BUS_0, &config);
uapi_i2s_dma_config(SIO_BUS_0, &attr);
/* DMA init. */
uapi_dma_init();
uapi_dma_open();
dma_channel_t dma_channel = uapi_dma_get_lli_channel(0, HAL_DMA_HANDSHAKING_MAX_NUM);
for (uint8_t i = 0; i < I2S_RING_BUFFER_NUMBER; i++) {
if (i2s_add_dma_lli_node(i, dma_channel, i2s_dma_trans_done_callback) != 0) {
osal_printk("i2s_add_dma_lli_node fail!\r\n");
return NULL;
}
}
if (uapi_dma_enable_lli(dma_channel, i2s_dma_trans_done_callback, (uintptr_t)NULL) == ERRCODE_SUCC) {
osal_printk("dma enable lli memory transfer succ!\r\n");
}
hal_sio_set_rx_enable(SIO_BUS_0, 1);
while (1) {
if (!(osal_event_read(&g_i2s_dma_id, I2S_DMA_TRANSFER_EVENT, OSAL_WAIT_FOREVER,
OSAL_WAITMODE_AND | OSAL_WAITMODE_CLR))) {
uapi_watchdog_kick();
continue;
}
app_printf_err();
}
return NULL;
}
static void i2s_entry(void)
{
osal_task *task_handle = NULL;
osal_kthread_lock();
task_handle = osal_kthread_create((osal_kthread_handler)i2s_dma_slave_task, 0, "I2sDmaSlaveTask",
I2S_TASK_STACK_SIZE);
if (task_handle != NULL) {
osal_kthread_set_priority(task_handle, I2S_TASK_PRIO);
}
osal_kthread_unlock();
}
/* Run the i2s_entry. */
app_run(i2s_entry);
注意事项¶
若要保证接收数据的连续性,建议slave端使用I2S DMA循环链表接收数据,普通的I2S接口因为主从时序性的问题,接收数据无法完全保证数据连续性,可能会出现丢失数据或者接收到0的存在。
TRNG¶
概述¶
TRNG是一种随机数获取接口。
功能描述¶
TRNG模块提供的接口及功能如下如下:
uapi_drv_cipher_trng_get_random(uint32_t *randnum):获取硬件随机数(randnum表示指向存储生成的随机数的缓冲区的指针)。
uapi_drv_cipher_trng_get_random_bytes(uint8_t *randnum, uint32_t size):获取指定大小的硬件随机数(randnum表示指向存储生成的随机数的缓冲区的指针,size表示生成随机数的大小)。
KCONFIG配置¶
无
开发指南¶
无
注意事项¶
无
附:MIDDLEWARE¶
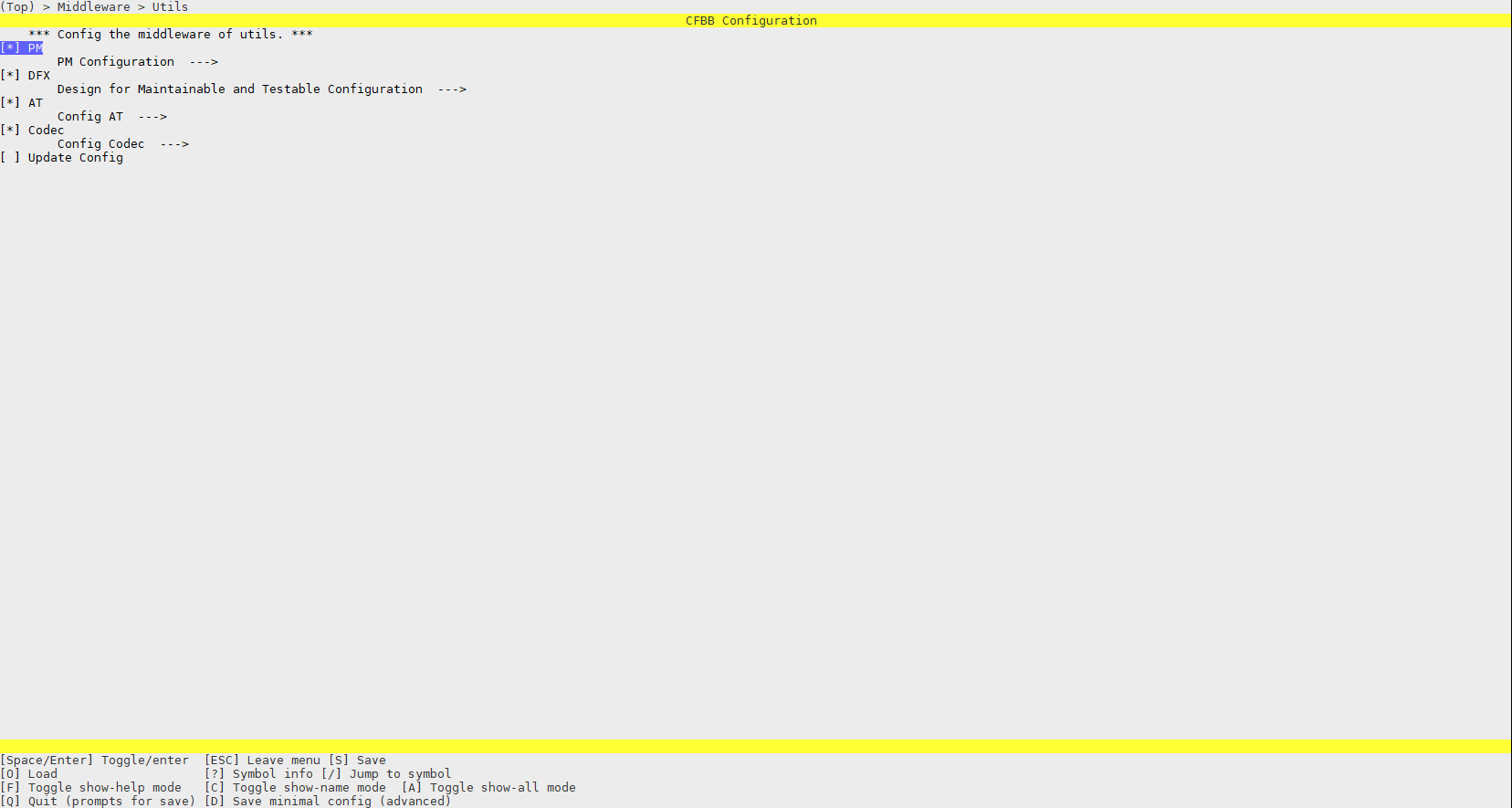




配置宏具体描述如表1所示。
表 1 middleware相关宏描述