
前言¶
本文为使用MCF开发的程序员而写,目的是为您在开发过程中遇到的问题提供解决办法和帮助。
说明: 本文以SS928V100描述为例,未有特殊说明,SS927V100与SS928V100内容一致。
与本文档相对应的产品版本如下。
本文档(本指南)主要适用于以下工程师:
技术支持工程师
软件开发工程师
在本文中可能出现下列标志,它们所代表的含义如下。





修订记录累积了每次文档更新的说明。最新版本的文档包含以前所有文档版本的更新内容。
概述¶
在低照度场景下,RGB Sensor捕获的图像往往信噪比非常差,细节丢失严重。基于RGB + Mono双Sensor的新型结构,RGB Sensor获取的可见光图像充分保留了颜色信息,而Mono Sensor配合红外补光技术,获取的红外图像有相对较高的信噪比,且细节表现较好。
黑白彩色双路融合技术(简称MCF技术,即Mono-Color-Fusion技术)用于融合上述可见光图像和红外图像,既保留颜色信息,同时充分提升图像的细节表现和信噪比,从而提高低照度场景下的图像质量。
功能描述¶
基本概念¶
MCF
MCF为Mono-Color-Fusion的简称,即黑白彩色融合技术。
GROUP
MCF对用户提供组(GROUP)的概念。最大可用数为OT_MCF_MAX_GRP_NUM个,各GROUP分时复用MCF硬件。每个MCF GROUP包含多个PIPE和多个通道。
PIPE
MCF组的PIPE。用于输入黑白彩色双路源图像。PIPE的数目即融合路数,为OT_MCF_PIPE_NUM。用户可以通过系统绑定和前端相连或者发送图像到PIPE中融合处理。
CHN
MCF组的通道。通道分为2种:物理通道和扩展通道。MCF硬件提供多个物理通道,每个通道具有缩放、裁剪等功能。扩展通道具备裁剪、缩放功能,它通过绑定物理通道,将物理通道输出作为自己的输入,把图像裁剪、缩放成用户设置的目标分辨率输出。
FRC
帧率控制,分为2种:组帧率控制和通道帧率控制。
组帧率控制:用于控制各GROUP对输入图像的接收。
通道帧率控制:用于控制各个物理通道和扩展通道图像的处理。
CROP
裁剪,分为3种:组裁剪、物理通道裁剪以及扩展通道裁剪。
组裁剪,MCF对输入图像进行裁剪。
物理通道裁剪,MCF对各个物理通道的输出图像进行裁剪。
扩展通道裁剪,MCF调用VGS对扩展通道的输出图像进行裁剪。
Scale
缩放,对图像进行缩小放大。缩放倍数指水平、垂直各缩放多少倍。
Mirror/Flip
Mirror即水平镜像,Flip即上下翻转。可使用Mirror+Flip实现180°旋转。
Mosaic
马赛克,对MCF输出图像在指定区域填充马赛克块。
MosaicEx
马赛克,调用VGS对MCF物理通道的输出图像指定区域填充马赛克块。
Cover
视频遮挡区域,对MCF的输出图像填充纯色块。
遮挡区域坐标类型分为绝对坐标遮挡和相对坐标比例遮挡。
Coverex
视频遮挡区域,调用VGS对MCF通道的输出图像填充纯色块。
遮挡区域坐标类型分为绝对坐标遮挡和相对坐标比例遮挡。相对坐标的计算是相对原图,不是通道图像,效果与Cover相对坐标等同。
OverlayEx
视频叠加区域,调用VGS对MCF通道的输出图像叠加位图。
Line
调用VGS对MCF物理通道的输出图像画线。
压缩
MCF支持linear格式的SEG压缩。
解压
MCF支持linear格式-SEG解压。
低延时
输出低延时,通道向后端模块发送低延时帧,MCF支持VI开启低延时。
功能描述¶
MCF在系统中位置如图1所示。

通过调用SYS模块的绑定接口,可与VI和VO/VENC/SVP等模块进行绑定,其中前者为MCF的输入源,后者为MCF的接收者。用户可通过MPI接口对GROUP进行管理。
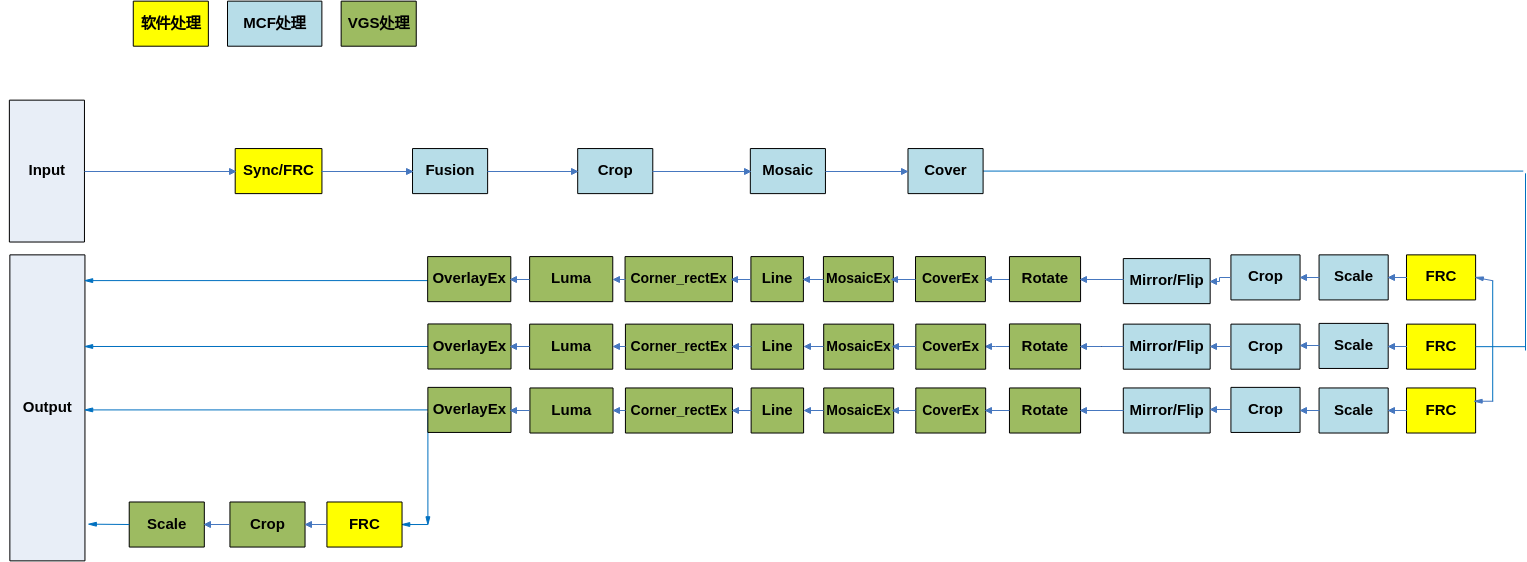
处理流程¶

图示仅说明数据流关系图,不是绑定关系图。
MCF前面的2个VPSS,用作MCF预处理。在VPSS性能不够时,可以设置VPSS组号为VGS组,使用VGS做预处理。
MCF融合时,需要2帧数据pts接近。推荐使用从模式sensor。
MCF融合场景,VI和VPSS必须离线。
输入输出特性¶
输入像素格式仅包含OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_400和OT_PIXEL_FORMAT_YUV_SEMIPLANAR_420。
输出像素格式仅OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422、OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_400、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_422和OT_PIXEL_FORMAT_YUV_SEMIPLANAR_420。
表 1 MCF输入特性
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_400 |
||||
表 2 MCF输入解压特性
表 3 MCF输入分辨率
表 4 MCF物理通道输出格式特性
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422、OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_422、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_400 |
|||||
表 5 MCF物理通道输出压缩特性
表 6 MCF物理通道输出分辨率
表 7 MCF物理通道压缩输出时功能限制
表 8 MCF扩展通道输出格式特性
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422、OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_422、OT_PIXEL_FORMAT_YUV_SEMIPLANAR_420、OT_PIXEL_FORMAT_YUV_400 |
||||||
表 9 MCF扩展通道输出压缩特性
表 10 MCF扩展通道输出分辨率
须知: SS928V100 MCF输入图像宽度大于4096时不支持紧凑段压缩输入/输出,输出宽度大于4096时不支持紧凑段压缩输出。
API参考¶
该功能模块为用户提供以下MPI:
ss_mpi_mcf_create_grp:创建一个MCF GROUP。
ss_mpi_mcf_destroy_grp:销毁一个MCF GROUP。
ss_mpi_mcf_reset_grp:复位MCF GROUP。
ss_mpi_mcf_start_grp:启用MCF GROUP。
ss_mpi_mcf_stop_grp:禁用MCF GROUP。
ss_mpi_mcf_set_grp_attr:设置MCF GROUP属性。
ss_mpi_mcf_get_grp_attr:获取MCF GROUP属性。
ss_mpi_mcf_set_alg_param:设置MCF算法参数。
ss_mpi_mcf_get_alg_param:获取MCF算法参数。
ss_mpi_mcf_set_grp_crop:设置MCF组CROP功能属性,用来裁剪MCF融合后产生的黑边。
ss_mpi_mcf_get_grp_crop:获取MCF组CROP功能属性。
ss_mpi_mcf_send_pipe_frame:用户向MCFpipe发送数据。
ss_mpi_mcf_set_chn_attr:设置MCF通道属性。
ss_mpi_mcf_get_chn_attr:获取MCF通道属性。
ss_mpi_mcf_enable_chn:启用MCF通道。
ss_mpi_mcf_disable_chn:禁用MCF通道。
ss_mpi_mcf_get_chn_frame:获取MCF通道帧数据。
ss_mpi_mcf_release_chn_frame:释放 MCF通道帧数据。
ss_mpi_mcf_set_low_delay_attr:设置低延迟输出属性。
ss_mpi_mcf_get_low_delay_attr:获取低延迟输出属性。
ss_mpi_mcf_attach_vb_pool:将MCF绑定到某个视频缓存VB池中。
ss_mpi_mcf_detach_vb_pool:将MCF的通道从某个视频缓存VB池中解绑定。
ss_mpi_mcf_set_chn_align:设置MCF通道输出YUV数据的行stride对齐。
ss_mpi_mcf_get_chn_align:获取MCF通道输出YUV数据的行stride对齐。
ss_mpi_mcf_set_chn_rotation:设置MCF通道图像固定角度旋转属性。
ss_mpi_mcf_get_chn_rotation:获取MCF通道图像固定角度旋转属性。
ss_mpi_mcf_set_ext_chn_attr:设置MCF GROUP扩展通道属性。
ss_mpi_mcf_get_ext_chn_attr:获取MCF GROUP扩展通道属性。
ss_mpi_mcf_set_chn_crop:设置MCF通道裁剪功能属性。
ss_mpi_mcf_get_chn_crop:获取MCF通道裁剪功能属性。
ss_mpi_mcf_get_chn_rgn_luma:获取指定图像区域的亮度总和。
ss_mpi_mcf_get_chn_fd:获取MCF通道对应的设备文件句柄。
ss_mpi_mcf_close_fd:关闭获取的文件句柄。
ss_mpi_mcf_calibration:标定参数接口。
ss_mpi_mcf_set_vi_attr:设置MCF场景下VI属性。
ss_mpi_mcf_get_vi_attr:获取MCF场景下VI属性。
ss_mpi_mcf_create_grp¶
【描述】
创建一个MCF GROUP。
【语法】
td_s32 ss_mpi_mcf_create_grp(ot_mcf_grp grp, const ot_mcf_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
组不支持重复创建。
目前仅支持相同幅形比的黑白图像与彩色图像进行融合,如16:9或者4:3。
黑白和彩色两路Sensor建议使用slave模式,当是主模式sensor时,两路Sensor的时序有时间差,目前当大于25ms时无法进行融合,丢掉偏差较大的那帧图,保证时间差最短的黑白、彩色各一帧图进行融合。
mcf 组输入的2个pipe 宽高可以不一样。但是2个pipe的输入图像的幅形比必须一致。mcf 组输出图像分辨率与2个pipe中大的一路图像分辨率一致。
【举例】
无
【相关主题】
ss_mpi_mcf_destroy_grp¶
【描述】
销毁一个MCF GROUP。
【语法】
td_s32 ss_mpi_mcf_destroy_grp(ot_mcf_grp grp);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建,如果销毁一个没有创建的组,返回成功。
调用此接口时,会一直等待此GROUP当前任务处理结束才会真正销毁。
destroy组之前,需先stop组。
【举例】
无
【相关主题】
ss_mpi_mcf_reset_grp¶
【描述】
复位MCF GROUP。
【语法】
td_s32 ss_mpi_mcf_reset_grp(ot_mcf_grp grp);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
【相关主题】
无
ss_mpi_mcf_start_grp¶
【描述】
启用MCF GROUP。
【语法】
td_s32 ss_mpi_mcf_start_grp(ot_mcf_grp grp);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
重复调用该函数启用同一个GROUP返回成功。
【举例】
无
【相关主题】
ss_mpi_mcf_stop_grp¶
【描述】
禁用MCF GROUP。
【语法】
td_s32 ss_mpi_mcf_stop_grp(ot_mcf_grp grp);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建,并且GROUP已经启动。
重复调用该函数禁用同一个GROUP返回成功。
结束成功后,再次调用ss_mpi_mcf_start_grp接口可返回成功。
【举例】
无
【相关主题】
ss_mpi_mcf_set_grp_attr¶
【描述】
设置MCF GROUP属性。
【语法】
td_s32 ss_mpi_mcf_set_grp_attr(ot_mcf_grp grp, const ot_mcf_grp_attr* grp_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
因MCF组属性的静态属性,不支持修改。仅frame_rate, mcf_path和depth信息不是静态属性,可修改。
GROUP属性必须合法,具体请参见ot_mcf_grp_attr。
【举例】
无
【相关主题】
ss_mpi_mcf_get_grp_attr¶
【描述】
获取MCF GROUP属性。
【语法】
td_s32 ss_mpi_mcf_get_grp_attr(ot_mcf_grp grp, ot_mcf_grp_attr* grp_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
GROUP必须已设置属性,若未设置则返回默认属性,默认属性在创建时设置。
【举例】
无
【相关主题】
ss_mpi_mcf_set_alg_param¶
【描述】
设置MCF算法参数。
【语法】
td_s32 ss_mpi_mcf_set_alg_param(ot_mcf_grp grp, const ot_mcf_alg_param *alg_param);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
创建MCF组时,会配置默认alg_param,当需要调试效果时,可调用本接口进行调试。
算法参数调节可参考《黑白彩色双路融合 调试指南》
【举例】
无
【相关主题】
ss_mpi_mcf_get_alg_param¶
【描述】
获取MCF算法参数。
【语法】
td_s32 ss_mpi_mcf_get_alg_param(ot_mcf_grp grp, ot_mcf_alg_param *alg_param);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
【举例】
无
【相关主题】
ss_mpi_mcf_set_grp_crop¶
【描述】
设置MCF 组CROP功能属性,用来裁剪MCF融合后产生的黑边。
【语法】
td_s32 ss_mpi_mcf_set_grp_crop(ot_mcf_grp grp, const ot_crop_info *crop_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
裁剪图像在图像内。
crop_info需保持2像素对齐。
【举例】
无
【相关主题】
ss_mpi_mcf_get_grp_crop¶
【描述】
获取MCF组CROP功能属性。
【语法】
td_s32 ss_mpi_mcf_get_grp_crop(ot_mcf_grp grp, ot_crop_info *crop_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已经创建。
【举例】
无
【相关主题】
ss_mpi_mcf_send_pipe_frame¶
【描述】
用户向MCFpipe 发送数据。
【语法】
td_s32 ss_mpi_mcf_send_pipe_frame(ot_mcf_grp grp, ot_mcf_pipe mcf_pipe, const ot_video_frame_info *video_frame, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_PIPE_NUM) |
||
超时参数milli_sec设为-1时,为阻塞接口;0时为非阻塞接口;大于0时为超时等待时间,超时时间的单位为毫秒(ms)。 |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
用户使用此接口时,可以自行进行帧率控制。
【举例】
无
【相关主题】
无
ss_mpi_mcf_set_chn_attr¶
【描述】
设置MCF通道属性。
【语法】
td_s32 ss_mpi_mcf_set_chn_attr(ot_mcf_grp grp, ot_mcf_chn chn, const ot_mcf_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_PHYS_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
扩展通道不支持此接口。
【举例】
无
【相关主题】
无
ss_mpi_mcf_get_chn_attr¶
【描述】
获取MCF通道属性。
【语法】
td_s32 ss_mpi_mcf_get_chn_attr(ot_mcf_grp grp, ot_mcf_chn chn, ot_mcf_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_PHYS_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
扩展通道不支持此接口。
【举例】
无
【相关主题】
无
ss_mpi_mcf_enable_chn¶
【描述】
启用MCF通道
【语法】
td_s32 ss_mpi_mcf_enable_chn(ot_mcf_grp grp, ot_mcf_chn chn);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
多次启用通道返回成功。
【举例】
无
【相关主题】
无
ss_mpi_mcf_disable_chn¶
【描述】
禁用MCF通道。
【语法】
td_s32 ss_mpi_mcf_disable_chn(ot_mcf_grp grp, ot_mcf_chn chn);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建并启动。
重复禁用通道返回成功。
【举例】
无
【相关主题】
无
ss_mpi_mcf_get_chn_frame¶
【描述】
获取MCF通道图像数据
【语法】
td_s32 ss_mpi_mcf_get_chn_frame(ot_mcf_grp grp, ot_mcf_chn chn, ot_video_frame_info *video_frame, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
该接口适用于MCF所有通道,包括物理通道与扩展通道。
该接口只在融合路输出时支持。
只有队列深度不为0,才能获取到图像。
调用该接口获取图像,不会对后端绑定的模块有影响。如后端绑定VO显示,可以在显示过程中获取图像,VO仍正常显示,不会受到影响。
当milli_sec设为-1时,表示阻塞模式,程序一直等待,直到获取到图像才返回。如果milli_sec等于0时,表示非阻塞模式。如果milli_sec大于0时,表示超时等待模式,参数的单位是毫秒,指超时时间,在此时间内如果没有获取到图像,则超时返回。
【举例】
无
【相关主题】
无
ss_mpi_mcf_release_chn_frame¶
【描述】
用户释放一帧通道图像
【语法】
td_s32 ss_mpi_mcf_release_chn_frame (ot_mcf_grp grp, ot_mcf_chn chn, ot_video_frame_info *video_frame);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
此接口需与ss_mpi_mcf_get_chn_frame配对使用。
【举例】
无
【相关主题】
无
ss_mpi_mcf_set_low_delay_attr¶
【描述】
设置通道低延时属性。
【语法】
td_s32 ss_mpi_mcf_set_low_delay_attr(ot_mcf_grp grp, ot_mcf_chn chn, const ot_low_delay_info *low_delay_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
设置低延时参数前必须先设置通道属性。
低延时不支持Flip。
低延时通道绑编码场景下,当有多个码流时,若设置编码通道优先级,此时低延时通道行数设置不能过小,建议设置128行以上,否则可能会引起非低延时通道阻塞不编码。
在低延时通道绑编码场景下,编码不支持软件抽场。在低延时单buffer绑定编码场景下,编码不支持去呼吸效应,不能开启重复编码的功能,包含增帧模式、超大帧重编码、码率波动导致的重编码,用户应把最大重编码次数设置为0。
开启通道低延时,图像不会进入通道用户队列,无法获取通道图像。
mcf物理通道扩展通道均不支持低延时onebuf。
mcf物理通道开启低延时,再开启固定角度旋转/MosaicEx/CoverEx/OverlayEx/Corner_rectEx/Line,会自适应关闭mcf物理通道低延时。
【举例】
无
【相关主题】
无
ss_mpi_mcf_get_low_delay_attr¶
【描述】
获取通道低延时属性。
【语法】
td_s32 ss_mpi_mcf_get_low_delay_attr(ot_mcf_grp grp, ot_mcf_chn chn, ot_low_delay_info *low_delay_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
无
【相关主题】
无
ss_mpi_mcf_attach_vb_pool¶
【描述】
将MCF绑定到某个视频缓存VB池中。
【语法】
td_s32 ss_mpi_mcf_attach_vb_pool(ot_mcf_grp grp, ot_mcf_chn chn, ot_vb_pool vb_pool);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
必须保证组已创建。用户必须调用接口ss_mpi_vb_create_pool(具体描述请参见《MPP媒体处理软件V5.0开发参考》“系统控制”章节。)创建一个视频缓存VB池,再通过调用接口ss_mpi_mcf_attach_vb_pool把当前组的通道绑定到固定PoolId的VB池中。支持多个组的多个通道绑定到同一个VB池中。
当要切换当前组绑定的VB池时,只需再调一次接口ss_mpi_mcf_attach_vb_pool正确配置需要绑定到的VB池即可。
pool必须保证是已创建VB池的有效pool_id。
在调用ss_mpi_mcf_detach_vb_pool后,销毁创建的VB之前,需要保证VB没有被MCF后端绑定的模块使用,可以通过sleep或清除后端模块通道缓存的方式先把VB都释放,再销毁缓存VB池。
User_VB大小根据MCF通道输出图像计算,具体计算公式参考ot_buffer.h。
绑定后,通道申请的VB均是从此VB池中获取,解绑后从公共VB池中获取。
【举例】
无
【相关主题】
无
ss_mpi_mcf_detach_vb_pool¶
【描述】
将MCF的通道从某个视频缓存VB池中解绑定
【语法】
td_s32 ss_mpi_mcf_detach_vb_pool(ot_mcf_grp grp, ot_mcf_chn mcf_chn);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
无
【相关主题】
无
ss_mpi_mcf_set_chn_align¶
【描述】
设置MCF通道输出YUV数据的行stride对齐。
【语法】
td_s32 ss_mpi_mcf_set_chn_align(ot_mcf_grp grp, ot_mcf_chn chn, td_u32 align);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
align 为0时stride对齐使用自动模式,对齐要求跟随系统。
align 为非0时使用指定的stride对齐。
当align 小于芯片IP要求的stride对齐时,系统分配buffer和计算stride还是以芯片IP要求stride对齐为准。
当align不等于芯片要求的stride对齐倍数时,系统分配buffer和计算stride向上对齐到芯片要求stride对齐的倍数。例:align设置为48,芯片要求32对齐时,系统分配buffer和计算stride时使用64对齐。
【举例】
无
【相关主题】
ss_mpi_mcf_get_chn_align¶
【描述】
获取MCF通道输出YUV数据的行stride对齐。
【语法】
td_s32 ss_mpi_mcf_get_chn_align(ot_mcf_grp grp, ot_mcf_chn chn, td_u32 *align);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
无
【相关主题】
ss_mpi_mcf_set_chn_rotation¶
【描述】
设置MCF通道图像固定角度旋转属性。
【语法】
td_s32 ss_mpi_mcf_set_chn_rotation(ot_mcf_grp grp, ot_mcf_chn chn, const ot_rotation_attr *rotation_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_PHYS_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
通道属性必须已设置。
仅物理通道支持。
仅支持YVU semi-planar 420,YUV semi-planar 420和单分量像素格式。
仅支持0度、90度、180度、270度的旋转,不支持任意角度旋转。
通道旋转不支持压缩写出。
【相关主题】
无
ss_mpi_mcf_get_chn_rotation¶
【描述】
获取MCF通道图像固定角度旋转属性。
【语法】
td_s32 ss_mpi_mcf_get_chn_rotation(ot_mcf_grp grp, ot_mcf_chn chn, ot_rotation_attr *rotation_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_PHYS_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【相关主题】
无
ss_mpi_mcf_set_ext_chn_attr¶
【描述】
设置MCF GROUP扩展通道属性,扩展通道的主要应用是进行二次缩放和帧率控制。
【语法】
td_s32 ss_mpi_mcf_set_ext_chn_attr(ot_mcf_grp grp, ot_mcf_chn chn, const ot_mcf_ext_chn_attr *ext_chn_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
扩展通道的输入绑定源必须为物理通道,宽、高需要满足2对齐,src_frame_rate必须大于等于dst_frame_rate,若都设置成-1,表示不进行帧率控制。
注意:src_frame_rate和dst_frame_rate具体描述请参见《MPP媒体处理软件V5.0开发参考》“系统控制”章节数据类型ot_frame_rate_ctrl的成员。
扩展通道以绑定的方式连接物理通道,每个扩展通道最多绑定一个物理通道。
多个扩展通道可以绑定到同一个物理通道。
【举例】
无
【相关主题】
ss_mpi_mcf_get_ext_chn_attr¶
【描述】
获取MCF GROUP扩展通道属性。
【语法】
td_s32 ss_mpi_mcf_get_ext_chn_attr(ot_mcf_grp grp, ot_mcf_chn chn, ot_mcf_ext_chn_attr *ext_chn_attr);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
无
【相关主题】
ss_mpi_mcf_set_chn_crop¶
【描述】
设置MCF通道裁剪功能属性。
【语法】
td_s32 ss_mpi_mcf_set_chn_crop(ot_mcf_grp grp, ot_mcf_chn chn, const ot_mcf_crop_info *crop_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
通道使能后才可以设置裁剪功能。
物理通道先做缩放后做裁剪;扩展通道先做裁剪后做缩放。
物理通道裁剪最小分辨率128x64;扩展通道裁剪最小分辨率64x64。
裁剪计算出的坐标和宽高自动向下2像素对齐。
如果裁剪区域超出图像范围,丢弃超出部分图像,优先保证裁剪坐标与所设置的参数相同。
【举例】
无
【相关主题】
ss_mpi_mcf_get_chn_crop¶
【描述】
获取MCF通道裁剪功能属性。
【语法】
td_s32 ss_mpi_mcf_get_chn_crop(ot_mcf_grp grp, ot_mcf_chn chn, ot_mcf_crop_info *crop_info);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
【举例】
无
【相关主题】
ss_mpi_mcf_get_chn_rgn_luma¶
【描述】
获取指定图像区域的亮度总和。该接口主要用于对OSD区域进行亮度和统计,根据统计的亮度,进行反色处理,使OSD区域更加明显。
【语法】
td_s32 ss_mpi_mcf_get_chn_rgn_luma(ot_mcf_grp grp, ot_mcf_chn chn, td_u32 num, const ot_rect *rgn, td_u64 *luma_data, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_PHYS_CHN_NUM) |
||
|
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建并且对应的通道已经使能。
统计区域的数量范围为[1, 64]。
统计区域坐标和宽高要求2像素对齐。
统计区域宽高最小为2x2,SS928V100统计区域宽高最大为8192x8192。
亮度和区域不得超出图像。
【举例】
无
【相关主题】
ss_mpi_mcf_get_chn_fd¶
【描述】
获取MCF通道对应的设备文件句柄。
【语法】
td_s32 ss_mpi_mcf_get_chn_fd(ot_mcf_grp grp, ot_mcf_chn chn);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
|
取值范围:[0, OT_MCF_MAX_CHN_NUM) |
【返回值】
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
无
【举例】
无
【相关主题】
无
ss_mpi_mcf_close_fd¶
【描述】
关闭获取的文件句柄。
【语法】
td_s32 ss_mpi_mcf_close_fd(td_void);
【返回值】
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
此接口不能与其他MPI接口同时调用,用户必须保证此接口与其他接口在时间上是串行调用的。
【举例】
无
【相关主题】
ss_mpi_mcf_get_grp_frame¶
【描述】
获取mcf组图像数据。
【语法】
td_s32 ss_mpi_mcf_get_grp_frame(ot_mcf_grp grp, ot_video_frame_info *color_frame, ot_video_frame_info *mono_frame, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
只有队列深度不为0,才能获取到图像。
该接口只在融合路输出时支持。
当milli_sec设为-1时,表示阻塞模式,程序一直等待,直到获取到图像才返回。如果milli_sec等于0时,表示非阻塞模式。如果milli_sec大于0时,表示超时等待模式,参数的单位是毫秒,指超时时间,在此时间内如果没有获取到图像,则超时返回。
【举例】
无
【相关主题】
无
ss_mpi_mcf_release_grp_frame¶
【描述】
释放mcf组图像数据。
【语法】
td_s32 ss_mpi_mcf_release_grp_frame(ot_mcf_grp grp, ot_video_frame_info *color_frame, ot_video_frame_info *mono_frame);
【参数】
|
取值范围:[0, OT_MCF_MAX_GRP_NUM) |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf.h、ss_mpi_mcf.h
库文件:libss_mcf.a
【注意】
GROUP必须已创建。
此接口需与ss_mpi_mcf_get_grp_frame配对使用。
【举例】
无
【相关主题】
ss_mpi_mcf_calibration¶
【描述】
标定参数接口。
【语法】
td_s32 ss_mpi_mcf_calibration(const ot_video_frame *pic_in_match, const ot_video_frame *pic_in_refer, ot_mcf_calibration_mode mode, ot_mcf_feature_info *feature_info, ot_mcf_calibration *calibration_info);
【参数】
图像信息。实际中只使用亮度,并且使用虚拟地址进行读取图像。只能输入mono图像,标定结果以color路为准,参数应用于mono路。 |
||
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_common_mcf_calibration.h、ot_mpi_mcf_calibration.h
库文件:libss_mcfcalibrate.a
【注意】
标定注意事项可参考《黑白彩色双路融合 调试指南》。
标定的两路输入图像宽高不能大于4096*2160,并且宽高和stride均相等。
标定要求输入图像的像素格式是YUV400、YUV420SP、YUV422SP、YUV420P、YUV422P。但MCF的功能通路mono的像素格式仅支持YUV400和YUV420SP,color通路仅支持YUV420SP。
标定要求输入图像不支持压缩模式。
标定要求输入图像的视频格式为线性模式。
标定过程所需系统内存参考下表。当输入分辨率大于2560x1440时,标定库内部会下采样一倍,因此该分辨率下所需内存最大。
标定的有效区域为图像顶部、底部、左侧、右侧剪裁宽度合围成的ROI区域,两路有效区域必须相等才能进行标定。默认全图做进行标定。
输入图像的宽高以及图像顶部、底部、左侧、右侧剪裁宽度必须8对齐。
【举例】
无
【相关主题】
无
ss_mpi_mcf_set_vi_attr¶
【描述】
设置MCF 场景下VI属性。
【语法】
td_s32 ss_mpi_mcf_set_vi_attr(ot_mcf_id mcf_id, const ot_mcf_vi_attr *mcf_vi_attr);
【参数】
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_mpi_mcf_vi.h
库文件:libss_mcf_vi.a
【注意】
退出VI之前,需要调用此接口ot_mcf_vi_attr的enable设置为FALSE,关闭MCF场景下VI相关属性设置。
VB属性需要置为OT_VB_SUPPLEMENT_BNR_MOT_MASK,具体描述请参见《MPP媒体处理软件V5.0开发参考》“系统控制”章节。
在VI送raw数据场景,在VI停止送raw数据之前,需要调用此接口ot_mcf_vi_attr的enable设置为FALSE。
将ot_mcf_vi_attr的enable设置为TRUE之后,表示开启MCF预处理功能,该功能建议默认开启,可以更好的优化低照下彩色图像的效果;开启时不建议调用mono_pipe通路的获取通道帧接口,会导致通路性能异常。
本接口在VPSS在线模式下不可用。
开启了防抖会影响MCF预处理效果,不建议防抖和MCF预处理功能同时使能。
开启压缩会影响MCF预处理效果,仅支持非压缩模式。
本接口不支持多进程使用。
ss_mpi_mcf_get_vi_attr¶
【描述】
获取MCF 场景下VI属性。
【语法】
td_s32 ss_mpi_mcf_get_vi_attr(ot_mcf_id mcf_id, ot_mcf_vi_attr *mcf_vi_attr);
【参数】
【返回值】
失败,请参见错误码。 |
【需求】
头文件:ot_mpi_mcf_vi.h
库文件:libss_mcf_vi.a
【注意】
本接口不支持多进程使用。
数据类型¶
MCF模块相关数据类型定义如下:
OT_MCF_MAX_GRP_NUM:定义MCF最大GROUP个数。
OT_MCF_PIPE_NUM:定义MCF PIPE个数。
OT_MCF_MAX_CHN_NUM:定义MCF最大通道个数。
OT_MCF_MAX_PHYS_CHN_NUM: 定义MCF最大物理通道个数。
OT_MCF_MAX_EXT_CHN_NUM: 定义MCF最大扩展通道个数。
OT_MCF_MAX_PIPE_WIDTH:定义MCF组的最大宽度。
OT_MCF_MAX_PIPE_HEIGHT:定义MCF组的最大高度。
OT_MCF_MIN_PIPE_WIDTH:定义MCF组的最小宽度。
OT_MCF_MIN_PIPE_HEIGHT:定义MCF组的最小高度。
OT_MCF_MAX_CHN_WIDTH:定义MCF物理通道的最大宽度。
OT_MCF_MAX_CHN_HEIGHT:定义MCF物理通道的最大高度。
OT_MCF_MIN_CHN_WIDTH:定义MCF物理通道的最小宽度。
OT_MCF_MIN_CHN_HEIGHT:定义MCF物理通道的最小高度。
OT_MCF_MAX_EXT_CHN_WIDTH:定义MCF扩展通道的最大宽度。
OT_MCF_MAX_EXT_CHN_HEIGHT:定义MCF扩展通道的最大高度。
OT_MCF_MIN_EXT_CHN_WIDTH:定义MCF扩展物理通道的最小宽度。
OT_MCF_MIN_EXT_CHN_HEIGHT:定义MCF扩展通道的最小高度。
OT_MCF_BIAS_LUT_NUM:定义MCF 算法参数BIAS lut表长度。
OT_MCF_WEIGHT_LUT_NUM:定义MCF 算法参数权重 lut表长度。
OT_MCF_CC_UV_GAIN_LUT_NUM:定义MCF 算法参数颜色校正 lut表长度。
OT_MCF_COEF_NUM:定义MCF 标定系数长度。
ot_mcf_grp:定义MCF GROUP类型。
ot_mcf_id:定义MCF ID类型。
ot_mcf_pipe:定义MCF PIPE类型。
ot_mcf_chn:定义MCF通道类型。
ot_mcf_crop_info:定义MCF crop属性。
ot_mcf_grp_attr:定义MCF GROUP属性。
ot_mcf_pipe_attr:定义MCF PIPE属性。
ot_mcf_chn_attr:定义MCF 通道属性。
ot_mcf_feature_info:定义MCF的标定返回的特征点信息。
ot_mcf_ext_chn_attr:定义MCF 扩展通道属性。
ot_mcf_calibration_mode:定义MCF标定模式。
ot_mcf_calibration:定义MCF的标定参数。
ot_mcf_hist_adj_mode:定义MCF亮度调整模式。
ot_mcf_fusion_alpha_mode:定义MCF融合模式。
ot_mcf_color_correct_cfg:定义MCF颜色校正参数。
ot_mcf_color_hf_proc_cfg:定义MCF可见光亮度高频处理参数。
ot_mcf_hist_adj_cfg:定义MCF直方图校正参数。
ot_mcf_fusion_global_alpha_mode_cfg:定义MCF全局融合参数。
ot_mcf_fusion_adaptive_alpha_mode_cfg:定义MCF自适应融合参数。
ot_mcf_filter_proc_cfg:定义MCF的滤波处理参数。
ot_mcf_detail_proc_cfg:定义MCF细节处理参数。
ot_mcf_base_proc_cfg:定义MCF融合参数。
ot_mcf_each_freq_proc_cfg:定义MCF各频段的处理参数。
ot_mcf_alg_param:MCF 算法参数。
ot_mcf_vi_attr:定义MCF VI属性。
ot_mcf_path:定义MCF输出通路。
OT_MCF_MAX_GRP_NUM¶
【说明】
定义MCF最大GROUP个数。
【定义】
#define OT_MCF_MAX_GRP_NUM 2
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_PIPE_NUM¶
【说明】
定义MCF PIPE个数。
【定义】
#define OT_MCF_PIPE_NUM 2
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_CHN_NUM¶
【说明】
定义MCF最大通道个数。
【定义】
#define OT_MCF_MAX_CHN_NUM (OT_MCF_MAX_PHYS_CHN_NUM + OT_MCF_MAX_EXT_CHN_NUM)
【注意事项】
MCF最大通道数为物理通道与扩展通道之和。
【相关数据类型及接口】
无
OT_MCF_MAX_PHYS_CHN_NUM¶
【说明】
定义MCF物理通道的最大个数。
【定义】
#define OT_MCF_MAX_PHYS_CHN_NUM 3
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_EXT_CHN_NUM¶
【说明】
定义MCF扩展通道的最大个数。
【定义】
#define OT_MCF_MAX_EXT_CHN_NUM 8
【注意事项】
数目根据方案设计和系统能力而定。
【相关数据类型及接口】
无
OT_MCF_MAX_PIPE_WIDTH¶
【说明】
定义MCF pipe最大宽度。
【定义】
#define OT_MCF_MAX_PIPE_WIDTH 8192
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_PIPE_HEIGHT¶
【说明】
定义MCF pipe的最大高度。
【定义】
#define OT_MCF_MAX_PIPE_HEIGHT 4096
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_PIPE_WIDTH¶
【说明】
定义MCF pipe的最小宽度。
【定义】
#define OT_MCF_MIN_PIPE_WIDTH 256
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_PIPE_HEIGHT¶
【说明】
定义MCF pipe组的最小高度。
【定义】
#define OT_MCF_MIN_PIPE_HEIGHT 256
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_CHN_WIDTH¶
【说明】
定义MCF物理通道的最大宽度。
【定义】
#define OT_MCF_MAX_CHN_WIDTH 16384
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_CHN_HEIGHT¶
【说明】
定义MCF物理通道的最大高度。
【定义】
#define OT_MCF_MAX_CHN_HEIGHT 8192
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_CHN_WIDTH¶
【说明】
定义MCF物理通道的最小宽度。
【定义】
#define OT_MCF_MIN_CHN_WIDTH 128
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_CHN_HEIGHT¶
【说明】
定义MCF通道的最小高度。
【定义】
#define OT_MCF_MIN_CHN_HEIGHT 64
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_EXT_CHN_WIDTH¶
【说明】
定义MCF扩展通道的最大宽度。
【定义】
#define OT_MCF_MAX_ EXT_CHN_WIDTH 16384
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MAX_EXT_CHN_HEIGHT¶
【说明】
定义MCF扩展通道的最大高度。
【定义】
#define OT_MCF_MAX_ EXT_CHN_HEIGHT 8192
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_EXT_CHN_WIDTH¶
【说明】
定义MCF扩展物理通道的最小宽度。
【定义】
#define OT_MCF_MIN_ EXT_CHN_WIDTH 64
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_MIN_EXT_CHN_HEIGHT¶
【说明】
定义MCF扩展通道的最小高度。
【定义】
#define OT_MCF_MIN_ EXT_CHN_HEIGHT 64
【注意事项】
无
【相关数据类型及接口】
无
OT_MCF_BIAS_LUT_NUM¶
【说明】
定义MCF 算法参数BIAS lut表长度。
【定义】
#define OT_MCF_BIAS_LUT_NUM 9
【注意事项】
无
【相关数据类型及接口】
OT_MCF_WEIGHT_LUT_NUM¶
【说明】
定义MCF 算法参数权重 lut表长度。
【定义】
#define OT_MCF_WEIGHT_LUT_NUM 33
【注意事项】
无
【相关数据类型及接口】
OT_MCF_CC_UV_GAIN_LUT_NUM¶
【说明】
定义MCF 算法参数颜色校正 lut表长度。
【定义】
#define OT_MCF_CC_UV_GAIN_LUT_NUM 256
【注意事项】
无
【相关数据类型及接口】
OT_MCF_COEF_NUM¶
【说明】
定义MCF 标定系数长度。
【定义】
#define OT_MCF_COEF_NUM 9
【注意事项】
无
【相关数据类型及接口】
ot_mcf_grp¶
【说明】
定义MCF GROUP类型。
【定义】
typedef td_s32 ot_mcf_grp;
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_id¶
【说明】
定义MCF ID类型。
【定义】
typedef td_s32 ot_mcf_id;
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_pipe¶
【说明】
定义MCF PIPE类型。
【定义】
typedef td_s32 ot_mcf_pipe;
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_chn¶
【说明】
定义MCF通道类型。
【定义】
typedef td_s32 ot_mcf_chn;
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_crop_info¶
【说明】
定义MCF crop属性。
typedef struct {
td_bool enable;
ot_coord crop_mode;
ot_rect crop_rect;
} ot_mcf_crop_info;
【成员】
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_grp_attr¶
【说明】
定义MCF GROUP属性。
【定义】
typedef struct {
td_bool sync_pipe;
ot_mcf_pipe_attr mono_pipe_attr;
ot_mcf_pipe_attr color_pipe_attr;
ot_frame_rate_ctrl frame_rate;
td_u32 depth;
ot_mcf_path mcf_path;
} ot_mcf_grp_attr;
【成员】
|
【注意事项】
当sync_pipe配置为FALSE时,则不会进行mono和color这两路图像的时间差值进行过滤,可能出现mono和color这两路图像的时间差较大的两帧图进行融合,当这两帧图在各自时间点的图像不一样时,进行MCF融合,图像效果会不好。
当sync_pipe配置为TRUE时,则不支持MCF模式切换成彩色路后销毁黑白路,切换成黑白路后销毁彩色路。
mono_pipe_attr中的pipe_id和color_pipe_attr的pipe_id 必须不一样。
mono_pipe_attr中的vpss_grp和color_pipe_attr的vpss_grp 必须不一样。
mono_pipe_attr中的 width、height 和 color_pipe_attr中的width、height 可以不一样,但是幅形比必须一致。mcf 组的图像宽高使用 mono_pipe_attr和color_pipe_attr 2组中数值大的一路。
当需要切换到MONO输出的时候, MONO路的VB分配方式需要跟COLOR路的分配方式一样,如果明确不会切换到MONO路输出, 只会在FUSION和COLOR两种输出通道切换,则无此要求。
若不指定depth,表示不需要系统为该MCF组缓存图像,故用户获取不到该组上的图像数据。系统默认不为组缓存图像,即depth默认为0。
若指定depth>0,系统将为该组缓存depth*2个图像,用户可通过接口ss_mpi_mcf_get_grp_frame获取该通道图像数据。具体分为以下几种情况:
用户一直不获取图像。
系统将自动更新最旧的图像数据,保证用户一旦开始获取,就可获取到最近最新的depth*2个连续图像。
用户连续获取depth次并一直不释放。
系统因获取不到VB而自动停止缓存新的图像,用户也不能获取新的图像。故建议用户保证获取和释放接口配对使用。
用户获取/释放的速度比MCF组产生图像的速度慢。
系统将自动更新用户仍未获取的最旧的图像数据,保证缓存的图像队列为最近的新图像。由于用户不能保证获取速度,导致获取的可能不是连续图像。
系统为MCF组缓存的depth*2个图像数据,占用MPP内部的缓存块(简称VB)。故用户应通过接口ss_mpi_vb_set_cfg 置足够的VB,否则可能由于系统缓存图像占用过多VB,从而影响MCF的正常运行。支持动态调整depth。如用户在不需要获取该MCF组数据时,可设置depth为0,以减少占用内部VB的数量;在需要获取时,再设置depth为合适的值,即可获取到设置时刻后的连续图像。组上的图像有黑白和彩色两路,所以占用的VB内存是depth*2。
SS927V100所有的组通道的输入总面积最大为2688x1520x2,SS928V100无此限制。
【相关数据类型及接口】
ot_mcf_pipe_attr¶
【说明】
定义MCF PIPE属性。
【定义】
typedef struct {
ot_mcf_pipe pipe_id;
ot_vpss_grp vpss_grp;
td_u32 width;
td_u32 height;
} ot_mcf_pipe_attr;
【成员】
【注意事项】
彩色路和黑白路输入的图像的幅形比必须一致。
VPSS的组号设置为[0, 99],使用vpss做预处理,VPSS组号设置为[100, 127]时,使用VGS做预处理。如果需要在MCF之后在绑定VPSS,并且VPSS性能不够时,可以使用VGS组做预处理。
【相关数据类型及接口】
ot_mcf_chn_attr¶
【说明】
定义MCF 通道属性。
【定义】
typedef struct {
td_bool mirror_en;
td_bool flip_en;
td_u32 width;
td_u32 height;
td_u32 depth;
ot_pixel_format pixel_format;
ot_compress_mode compress_mode;
ot_frame_rate_ctrl frame_rate;
} ot_mcf_chn _attr;
【成员】
【注意事项】
源帧率与目标帧率都为-1,则不进行帧率控制。
目标帧率不能大于源帧率。
若不指定depth,表示不需要系统为该MCF通道缓存图像,故用户获取不到该通道的图像数据。系统默认不为通道缓存图像,即depth默认为0。
若指定depth>0,系统将为该通道缓存depth个图像,用户可通过接口ss_mpi_mcf_get_chn_frame获取该通道图像数据。具体分为以下几种情况:
用户一直不获取图像。
系统将自动更新最旧的图像数据,保证用户一旦开始获取,就可获取到最近最新的depth个连续图像。
用户连续获取depth次并一直不释放。
系统因获取不到VB而自动停止缓存新的图像,用户也不能获取新的VI图像。故建议用户保证获取和释放接口配对使用。
用户获取/释放的速度比MCF通道产生图像的速度慢。
系统将自动更新用户仍未获取的最旧的图像数据,保证缓存的图像队列为最近的新图像。由于用户不能保证获取速度,导致获取的可能不是连续图像。
系统为MCF通道缓存的depth个图像数据,占用MPP内部的缓存块(简称VB)。故用户应通过接口ss_mpi_vb_set_cfg 置足够的VB,否则可能由于系统缓存图像占用过多VB,从而影响MCF的正常运行。支持动态调整depth。如用户在不需要获取该MCF通道数据时,可设置depth为0,以减少占用内部VB的数量;在需要获取时,再设置depth为合适的值,即可获取到设置时刻后的连续图像。
【相关数据类型及接口】
ot_mcf_feature_info¶
【说明】
定义MCF的标定返回的特征点信息。
【定义】
typedef struct {
td_s32 refer_feature_num;
td_s32 register_feature_num;
td_s32 match_feature_num;
} ot_mcf_feature_info;
【成员】
【注意事项】
无
【相关数据类型及接口】
无
ot_mcf_ext_chn_attr¶
【说明】
定义MCF 扩展通道属性。
【定义】
typedef struct {
ot_mcf_chn bind_chn;
td_u32 width;
td_u32 height;
ot_pixel_format pixel_format;
ot_compress_mode compress_mode;
td_u32 depth;
ot_frame_rate_ctrl frame_rate;
} ot_mcf_ext_chn_attr;
【成员】
【注意事项】
绑定源物理通道必须合法,范围为[0, OT_MCF_MAX_PHYS_CHN_NUM)。
宽、高必须满足2对齐。
目标帧率不能大于源帧率,源帧率与目标帧率都为-1,则不进行帧率控制。
【相关数据类型及接口】
无
ot_mcf_calibration_mode¶
【说明】
定义MCF标定模式。
【定义】
typedef enum {
OT_MCF_CALIBRATION_AFFINE = 0, /* affine Transform mode */
OT_MCF_CALIBRATION_PROJECTIVE, /* projective mode */
OT_MCF_CALIBRATION_MODE_BUTT
} ot_mcf_calibration_mode;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_calibration¶
【说明】
定义MCF的标定参数。
【定义】
typedef struct {
td_s64 correct_coef[OT_MCF_COEF_NUM];
ot_rect region;
} ot_mcf_calibration;
【成员】
correct_coef[OT_MCF_COEF_NUM] |
correct_coef [0]:取值范围为:[314572, 1782578]。 correct_coef [1]:取值范围为:[-734002, 734002]。 correct_coef [2]:取值范围为:[-2147483647, 2147483646]。 correct_coef [3]:取值范围为:[-734002, 734002]。 correct_coef [4]:取值范围为:[314572, 1782578]。 correct_coef [5]:取值范围为:[-2147483647, 2147483646]。 correct_coef [6]:取值范围为:[-52,208]。 correct_coef [7]:取值范围为:[-52,208]。correct_coef [8]:取值固定为1048576。 |
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_hist_adj_mode¶
【说明】
定义MCF亮度调整模式。
【定义】
typedef enum {
OT_MCF_NO_HIST_ADJ = 0,
OT_MCF_COLOR_HIST_ADJ,
OT_MCF_MONO_HIST_ADJ,
OT_MCF_HIST_ADJ_MODE_BUTT,
} ot_mcf_hist_adj_mode;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_fusion_alpha_mode¶
【说明】
定义MCF融合模式。
【定义】
typedef enum {
OT_MCF_FUSION_GLOBAL_MODE = 0,
OT_MCF_FUSION_ADAPTIVE_MODE,
OT_MCF_FUSION_ALPHA_MODE_BUTT,
} ot_mcf_fusion_alpha_mode;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_color_correct_cfg¶
【说明】
定义MCF颜色校正参数。
【定义】
typedef struct {
td_bool color_correct_en;
td_u8 cc_thd_y;
td_u16 cc_uv_gain_lut[OT_MCF_CC_UV_GAIN_LUT_NUM];
} ot_mcf_color_correct_cfg;
【成员】
|
|
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_color_hf_proc_cfg¶
【说明】
定义MCF可见光亮度高频处理参数。
【定义】
typedef struct {
td_bool color_hf_en;
td_u8 color_hf_gain;
td_bool color_med_en;
} ot_mcf_color_hf_proc_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_hist_adj_cfg¶
【说明】
定义MCF直方图校正参数。
【定义】
typedef struct {
td_bool hist_adj_en;
td_u8 hist_adj_str;
ot_mcf_hist_adj_mode hist_adj_mode;
} ot_mcf_hist_adj_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
当开启分块时,hist_adj_en关闭,hist_adj_str和hist_adj_mode无效果。
【相关数据类型及接口】
无
ot_mcf_fusion_global_alpha_mode_cfg¶
【说明】
定义MCF全局融合参数。
【定义】
typedef struct {
td_u8 fusion_global_alpha;
} ot_mcf_fusion_global_alpha_mode_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_fusion_adaptive_alpha_mode_cfg¶
【说明】
定义MCF自适应融合参数。
【定义】
typedef struct {
td_u8 fusion_ratio_scale;
td_u8 fusion_ratio_bias_lut[OT_MCF_BIAS_LUT_NUM];
td_u8 fusion_mono_flat_bias_lut[OT_MCF_BIAS_LUT_NUM];
td_bool fusion_mono_ratio_en;
td_u8 fusion_mono_ratio_lut[OT_MCF_WEIGHT_LUT_NUM];
td_bool fusion_mono_flat_en;
td_u8 fusion_mono_flat_lut[OT_MCF_WEIGHT_LUT_NUM];
td_bool fusion_color_ratio_en;
td_u8 fusion_color_ratio_lut[OT_MCF_WEIGHT_LUT_NUM];
td_u8 fusion_alpha_lut[OT_MCF_WEIGHT_LUT_NUM];
} ot_mcf_fusion_adaptive_alpha_mode_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_filter_proc_cfg¶
【说明】
定义MCF的滤波处理参数。
【定义】
typedef struct {
td_u8 mono_flt_radius;
td_u8 mono_flt_bias_lut[OT_MCF_BIAS_LUT_NUM];
td_u8 color_flt_radius;
td_u8 color_flt_sgms;
td_u8 color_flt_sgmr;
} ot_mcf_filter_proc_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_detail_proc_cfg¶
【说明】
定义MCF细节处理参数。
【定义】
typedef struct {
td_bool fusion_mono_det_adap_en;
td_u8 fusion_mono_det_lut[OT_MCF_WEIGHT_LUT_NUM];
td_u8 fusion_det_gain;
} ot_mcf_detail_proc_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_base_proc_cfg¶
【说明】
定义MCF融合参数。
【定义】
typedef struct {
ot_mcf_fusion_alpha_mode fusion_alpha_mode;
ot_mcf_fusion_global_alpha_mode_cfg fusion_global_alpha_mode_cfg;
ot_mcf_fusion_adaptive_alpha_mode_cfg fusion_adaptive_alpha_mode_cfg;
} ot_mcf_base_proc_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_each_freq_proc_cfg¶
【说明】
定义MCF各频段的处理参数。
【定义】
typedef struct {
ot_mcf_filter_proc_cfg filter_proc_cfg;
ot_mcf_detail_proc_cfg detail_proc_cfg;
ot_mcf_base_proc_cfg base_prco_cfg;
} ot_mcf_each_freq_proc_cfg;
【成员】
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_alg_param¶
【说明】
MCF 算法参数。
【定义】
typedef struct {
ot_mcf_color_correct_cfg mcf_color_correct_cfg;
ot_mcf_color_hf_proc_cfg mcf_color_hf_proc_cfg;
ot_mcf_hist_adj_cfg mcf_hist_adj_cfg;
ot_mcf_each_freq_proc_cfg mcf_hf_cfg;
ot_mcf_each_freq_proc_cfg mcf_mf_cfg;
ot_mcf_each_freq_proc_cfg mcf_lf_cfg;
} ot_mcf_alg_param;
【成员】
MCF 高频参数配置,请参考ot_mcf_each_freq_proc_cfg参数说明。 |
|
MCF 中频参数配置,请参考ot_mcf_each_freq_proc_cfg参数说明。 |
|
MCF 低频参数配置,请参考ot_mcf_each_freq_proc_cfg参数说明。 |
【注意事项】
算法参数调节可参考《黑白彩色双路融合 调试指南》。
【相关数据类型及接口】
无
ot_mcf_vi_attr¶
【说明】
定义MCF VI属性。
【定义】
typedef struct {
td_bool enable;
ot_vi_pipe mono_pipe;
ot_vi_pipe color_pipe;
} ot_mcf_vi_attr;
【成员】
【注意事项】
无
【相关数据类型及接口】
ot_mcf_path¶
【说明】
定义MCF输出通路。
【定义】
typedef enum {
OT_MCF_PATH_FUSION = 0,
OT_MCF_PATH_COLOR,
OT_MCF_PATH_MONO,
OT_MCF_PATH_BUTT,
} ot_mcf_path;
【成员】
【注意事项】
无
【相关数据类型及接口】
无
错误码¶
MCF API错误码如下所示。
表 1 MCF API错误码
Proc 调试信息说明¶
【调试信息】
[MCF] version: [V1.0.0.0 B010 Release], build time[Apr 14 2021, 09:52:27]
----------------------------------------------------------mcf group attr-------------------------------------------------
grp sync mcf_path src_frame_rate dst_frame_rate depth
0 y fusion -1 -1 0
-----------------------------------------------------mcf group crop attr-------------------------------------------------
grp crop_en x y width height
0 n 0 0 0 0
-----------------------------------------------------mcf pipe attr-------------------------------------------------------
grp pipe_id vpss_grp color/mono width height pixel_fmt
0 1 1 color 3840 2160 YVU-SP420
0 0 100 mono 3840 2160 YVU-SP420
-----------------------------------------------------mcf pre-process info------------------------------------------------
grp pipe_id input_num send_num recv_num output_num
0 1 204 204 202 202
0 0 204 204 203 203
----------------------------------------mcf pre-process queue info----------------------------------------
grp pipe_id input_num output_num lost_num busy_num free_num
0 1 202 200 0 0 8
0 0 203 200 0 3 5
-----------------------------------------------------mcf fusion info------------------------------------------------------
grp pipe_id input_num send_num recv_num output_num
0 1 202 200 200 200
0 0 203 200 200 200
-----------------------------------------------------mcf phys chn attr---------------------------------------------------
grp chn width height pixel_fmt cmp_mode depth src_frame_rate dst_frame_rate mirror flip
0 0 3840 2160 YVU-SP420 none 0 -1 -1 n n
-----------------------------------------------------mcf phys chn crop attr---------------------------------------------
grp chn crop_en coord x y width height trim_x trim_y trim_width trim_height
0 0 n ABS 0 0 0 0
-----------------------------------------------------mcf phys chn other attr--------------------------------------------
grp chn low_delay_en low_delay_line rotation_en rotation_fixed align pool_id
0 0 n 0 n 0 32 -1
-----------------------------------------------------mcf ext chn attr-----------------------------------------------------
grp ext_chn width height pixel_fmt cmp_mode depth src_frame_rate dst_frame_rate bind_phys_chn
----------------------------------------mcf ext chn crop attr-----------------------------------------------
grp ext_chn crop_en coord x y width height trim_x trim_y trim_width trim_height
-----------------------------------------------------mcf ext chn other attr----------------------------------------------
grp ext_chn low_delay_en low_delay_line align pool_id
-----------------------------------------------------mcf phys chn run info----------------------------------------------
grp chn width height frame_rate frame_cnt
0 0 3840 2160 29 200
----------------------------------------mcf ext chn run info------------------------------------------------
grp ext_chn width height frame_rate frame_cnt
【参数说明】
FAQ¶
如何消除2组镜头的视差¶
【现象】
如果2个组镜头存在视差,导致图像融合效果不理想。
【解决方法】
调用mcf标定工具标定,将标定结果的correct_coef数据,调用ss_mpi_vi_set_chn_fov_correction_attr(具体请参考《MPP 媒体处理软件 V5.0 开发参考》“视频输入”章节)接口做视差矫正。
如何消除视差矫正后黑边情况¶
【现象】
视差矫正后,黑白2路图像融合后存在黑边情况。
【解决方法】
调用mcf标定工具标定,将标定结果的region数据,调用ss_mpi_mcf_set_grp_crop接口把黑边裁剪掉。
如何正确配置ISP的BNR属性¶
【现象】
融合后噪声大。
【解决方法】
正确设置VB属性和调用ss_mpi_mcf_set_vi_attr接口可以提高降噪效果。具体方法请参考mcf sample 1。
注意: VB属性设置一定要设置为OT_VB_SUPPLEMENT_BNR_MOT_MASK。
黑白彩色双路融合场景和正常场景如何切换¶
【现象】
白天场景不需要黑白彩色双路融合,夜晚场景需要黑白彩色双路融合。
【解决方法】
方法1:通过调节算法参数中的fusion_alpha_lut值,可以做到输出平滑切换。fusion_alpha_lut = 0 时输出彩色路图像,fusion_alpha_lut = 255 时输出黑白图像。
优点:软切换,可以做到效果平滑切换。
缺点:切换后2路图像都在运行,带宽高,能耗高。
方法2:通过设置组属性中的mcf_path. 当mcf_path = OT_MCF_PATH_FUSION 时,MCF模块输出融合后图像,mcf_path = OT_MCF_PATH_COLOR时,输出彩色路,mcf_path = OT_MCF_PATH_MONO时,输出黑白路。当设置为OT_MCF_PATH_MONO输出时,要求黑白路输入为420格式。
可分为两种模式:开启帧同步与关闭帧同步模式。
开启同步模式:参考sample_mcf (3)
优点:切换过程中帧的pts一直是连续的。
缺点:切换模式后两路图像都在运行,不支持销毁另外一路图像。
关闭同步模式:参考sample_mcf (4)
优点:切换过程中支持销毁另外一路图像,可以关闭一路vi,节省带宽。
缺点:属于硬切换,切换效果不能平滑,切换过程中帧的pts不能保持连续。
方法3:先取消mcf和mcf后面的vpss绑定关系,再重新vi绑定vpss。
优点:切换后场景性能最优。
缺点:需要设置绑定关系,中间会丢帧。
分块场景不支持组和通道裁剪¶
【现象】
分块时不支持组和通道裁剪。
【解决方法】
分块场景下若要进行裁剪(比如7.2节描述的校正后黑边),建议后面接一个vpss来进行crop,同时前面mcf不建议缩放(放到后面vpss一起做)。