
前言¶
本文档为SVP2.0平台_识别_分析方案开发的程序员而写,目的是供您在开发过程中查阅SVP2.0支持的各种参考信息,包括API、头文件、错误码等。
说明: 本文未有特殊说明,SS927V100与SS928V100内容完全一致。
与本文档相对应的产品版本如下。
本文档(本指南)主要适用于以下工程师:
技术支持工程师
软件开发工程师
在本文中可能出现下列标志,它们所代表的含义如下。





修订记录累积了每次文档更新的说明。最新版本的文档包含以前所有文档版本的更新内容。
MAU¶
概述¶
MAU(Matrix Arithmetic Unit)为_识别_分析系统中的矩阵算术单元。用户基于MAU进行矩阵运算,降低CPU占用。
功能描述¶
重要概念¶
句柄(handle)
用户在调用MAU API创建任务时,系统会为每个任务分配一个handle,用于标识不同的任务。
及时返回结果标志is_instant
用户在创建某个任务后,希望及时得到该任务完成的信息,则需要在创建该任务时,将is_instant设置为TD_TRUE。否则,如果用户不关心该任务是否完成,建议将is_instant设置为TD_FALSE,这样可以与后续任务组链执行,减少中断次数,提升性能。
查询(query)
用户根据系统返回的handle,调用ss_mpi_svp_mau_query可以查询对应算子任务是否完成。
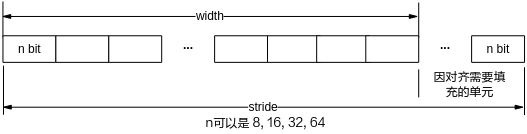
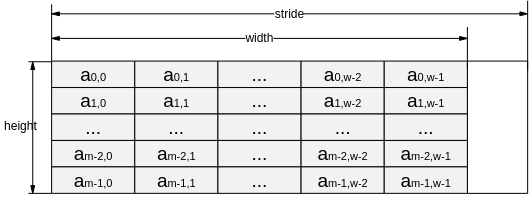
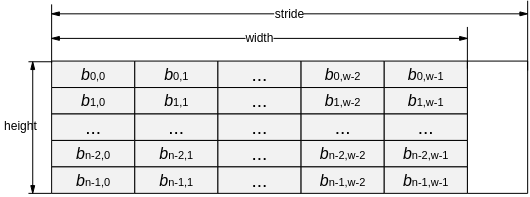
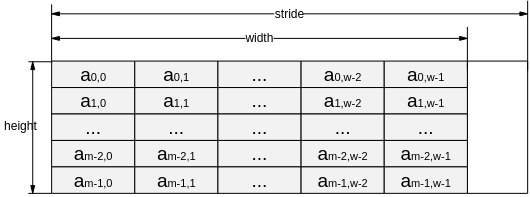
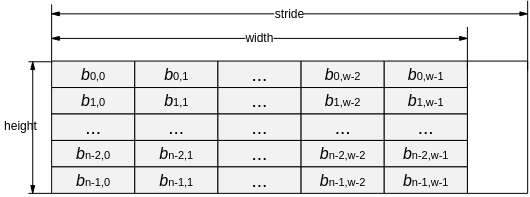
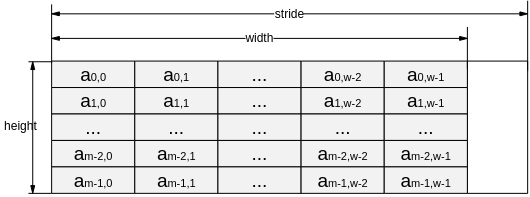
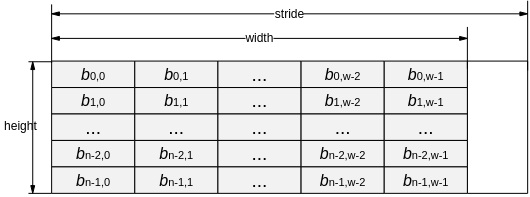
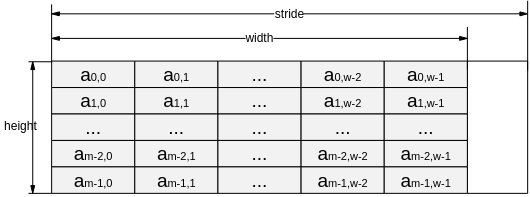
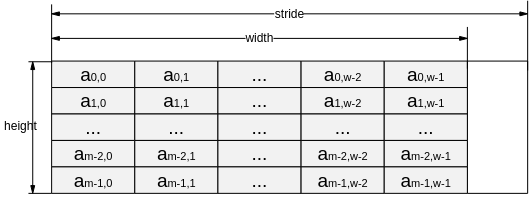
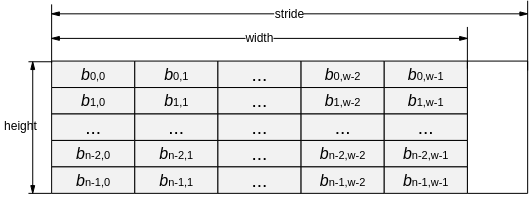
跨度(stride)
一行的有效数据byte数目 + 为硬件快速跨越到下一行补齐的一些无效byte数目,如图1所示。注意不同的数据结构行存储表示的有效元素数目的变量不一样,且其度量跟stride不一定是一样的。
ot_svp_blob行存储方向表示的有效元素数目变量是width。
seq 行存储方向表示的有效元素数目变量是dim。
对齐
硬件为了快速访问内存首地址或者跨行访问数据,要求内存地址或内存跨度必须为对齐系数的倍数。
数据内存首地址对齐
跨度对齐
输入、输出数据类型
块数据
ot_svp_blob、ot_svp_src_blob、ot_svp_dst_blob,类型参考ot_svp_blob_type,具体的内存分配如图2~图18所示。
一维数据
ot_svp_mem_info,表示一维数据,如图19。
BLOB内存排布类型
表 1 BLOB内存排布类型表
多帧多通道S20Q12类型数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_S20Q12类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧无符号8bit多通道数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_U8类型ot_svp_blob(3通道2帧示意图)所示。 |
|
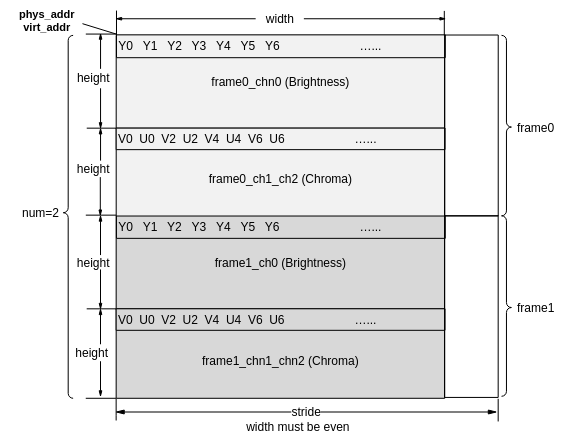
多帧YCbCr420 SemiPlannar数据格式图像顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn=3,如 OT_SVP_BLOB_TYPE_YVU420SP类型ot_svp_blob(2帧YVU420SP示意图)所示。色度部分V在前,U在后。 |
|
多帧YCbCr422 SemiPlannar数据格式图像顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn=3,如 OT_SVP_BLOB_TYPE_YVU422SP类型ot_svp_blob(2帧YVU422SP示意图)所示。色度部分V在前,U在后。 |
|
多帧S20Q12类型向量数据顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示向量数据维度,height表示单帧有多少个向量(一般height=1),chn=1,如 OT_SVP_BLOB_TYPE_VEC_S20Q12类型ot_svp_blob(2帧示意图)所示。 |
|
多段S20Q12类型序列数据排布。此时ot_svp_blob结构体中,num表示段数,dim表示序列向量数据维度,virt_addr_step是一个num长度的数组地址,数组元素表示每段序列有多少个向量,如 OT_SVP_BLOB_TYPE_SEQ_S20Q12类型ot_svp_blob (num=N帧示意图)所示。 |
|
多帧多通道S20Q12类型数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width=4,height表示bbox个数,chn=1,如 OT_SVP_BLOB_TYPE_BBOX_S20Q12类型ot_svp_blob(1通道1帧示意图)所示。 |
|
多帧多通道32bit量化数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示坐标最大个数,height=6,chn表述类别个数,如 OT_SVP_BLOB_TYPE_BSI_SQ32类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道S12Q20类型数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_S12Q20类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧S12Q20类型向量数据顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示向量数据维度,height表示单帧有多少个向量(一般height=1),chn=1,如 OT_SVP_BLOB_TYPE_VEC_S12Q20类型ot_svp_blob(2帧示意图)所示。 |
|
多帧多通道有符号32bit数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_S32类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道无符号32bit数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_U32类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道32bit浮点数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_FP32类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道16bit浮点数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_FP16类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道有符号8bit数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_S8类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道有符号16bit数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_S16类型ot_svp_blob(2通道2帧示意图)所示。 |
|
多帧多通道无符号8bit数据Planar格式存储顺序排布。此时ot_svp_blob结构体中,num表示帧数,width表示图像宽,height表示图像高,chn表示单帧图像通道数,如 OT_SVP_BLOB_TYPE_U16类型ot_svp_blob(2通道2帧示意图)所示。 |
图 2 OT_SVP_BLOB_TYPE_S20Q12类型ot_svp_blob(2通道2帧示意图)
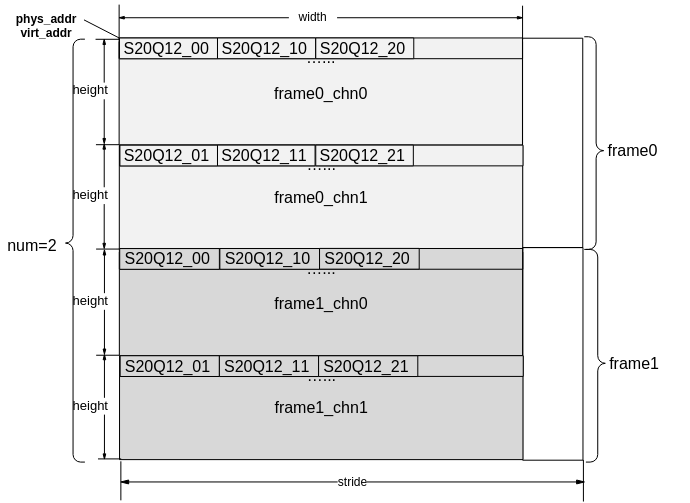
图 3 OT_SVP_BLOB_TYPE_U8类型ot_svp_blob(3通道2帧示意图)
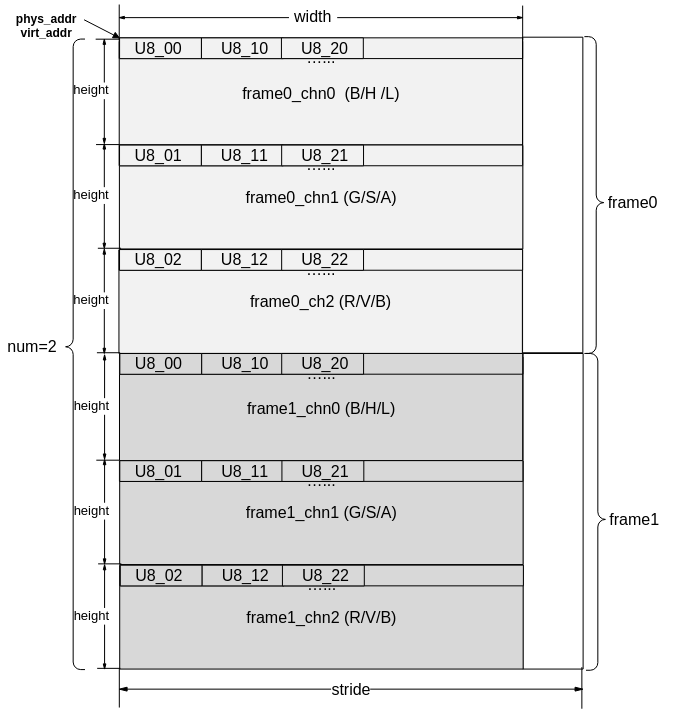
注:典型的RGB\HSV\LAB图像Planar格式存储。
图 4 OT_SVP_BLOB_TYPE_YVU420SP类型ot_svp_blob(2帧YVU420SP示意图)
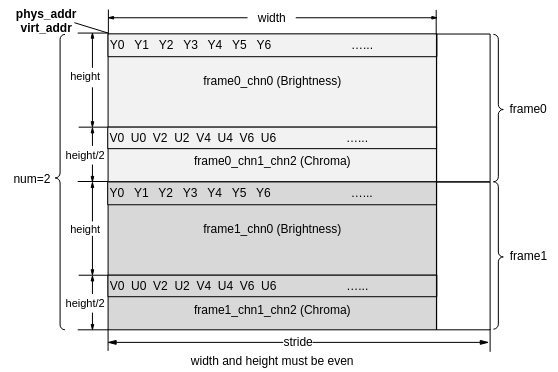
注:这里V在前,U在后。
图 5 OT_SVP_BLOB_TYPE_YVU422SP类型ot_svp_blob(2帧YVU422SP示意图)
注:这里V在前,U在后。
图 6 OT_SVP_BLOB_TYPE_VEC_S20Q12类型ot_svp_blob(2帧示意图)
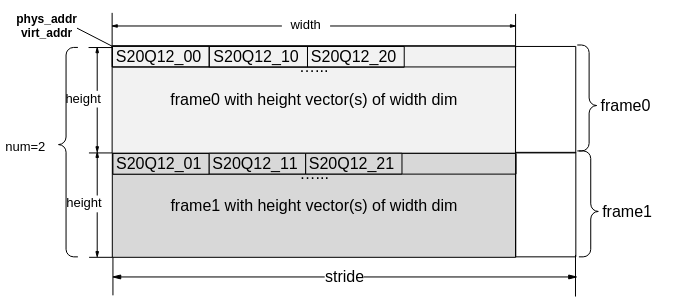
图 7 OT_SVP_BLOB_TYPE_SEQ_S20Q12类型ot_svp_blob (num=N帧示意图)

图 8 OT_SVP_BLOB_TYPE_BBOX_S20Q12类型ot_svp_blob(1通道1帧示意图)
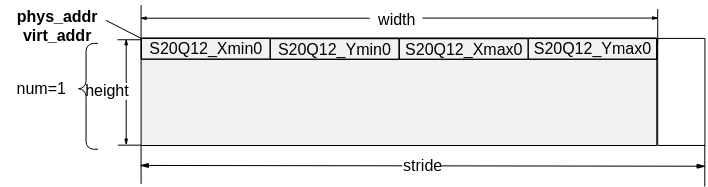
图 9 OT_SVP_BLOB_TYPE_BSI_SQ32类型ot_svp_blob(2通道2帧示意图)
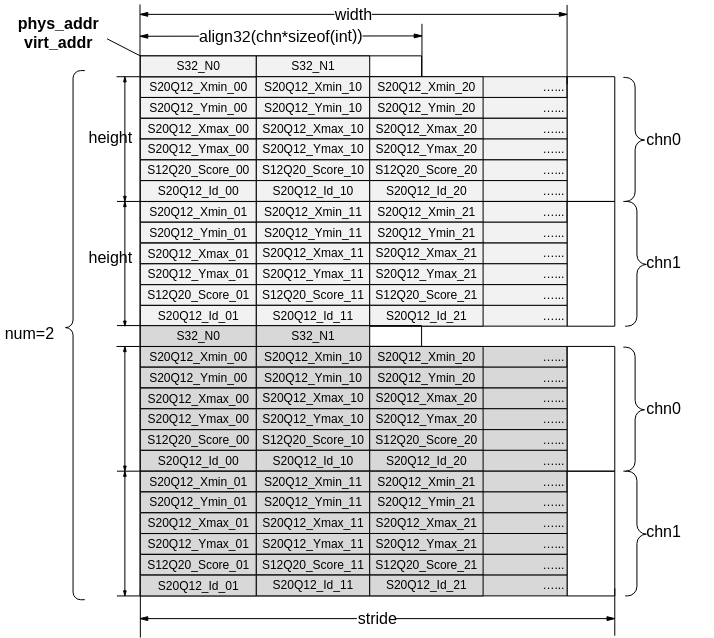
注:align32表示32字节对齐。
图 10 OT_SVP_BLOB_TYPE_S12Q20类型ot_svp_blob(2通道2帧示意图)
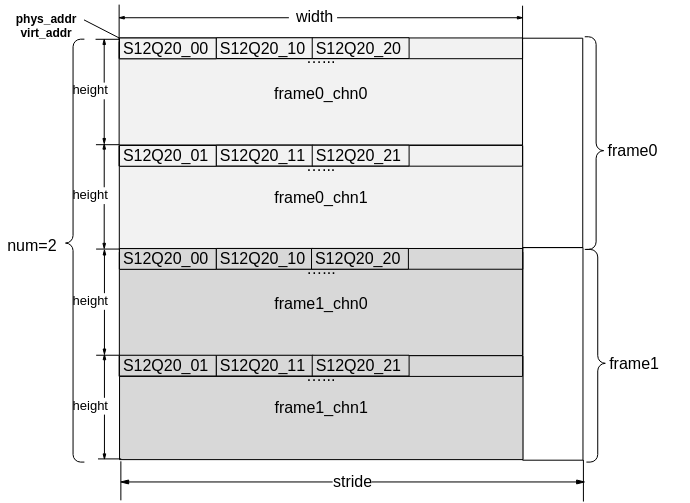
图 11 OT_SVP_BLOB_TYPE_VEC_S12Q20类型ot_svp_blob(2帧示意图)
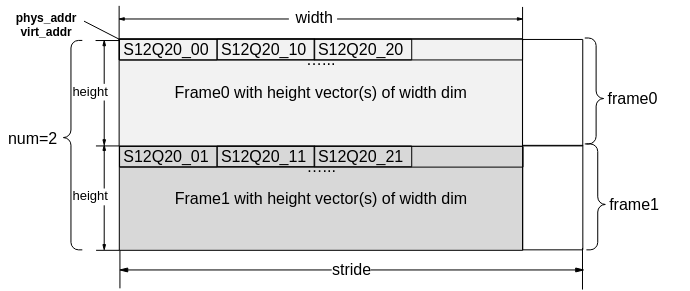
图 12 OT_SVP_BLOB_TYPE_S32类型ot_svp_blob(2通道2帧示意图)
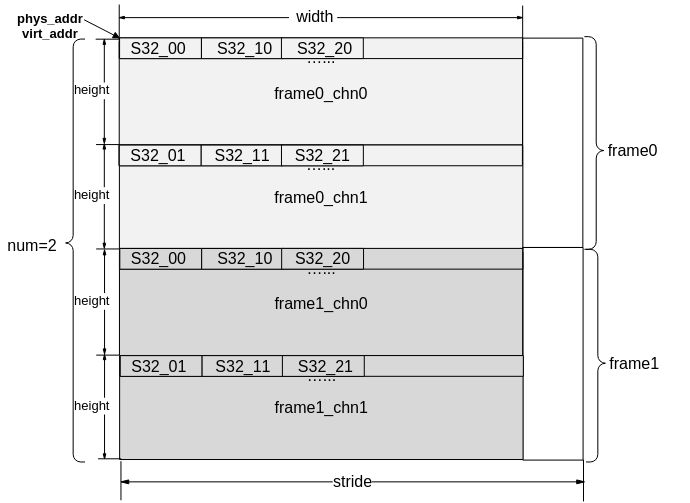
图 13 OT_SVP_BLOB_TYPE_U32类型ot_svp_blob(2通道2帧示意图)
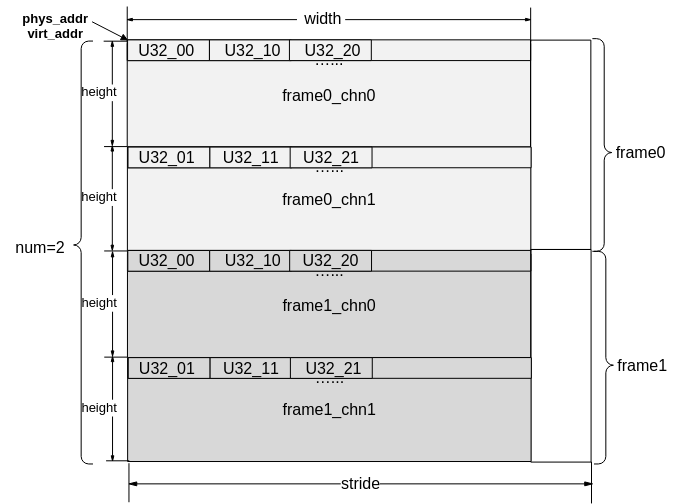
图 14 OT_SVP_BLOB_TYPE_FP32类型ot_svp_blob(2通道2帧示意图)
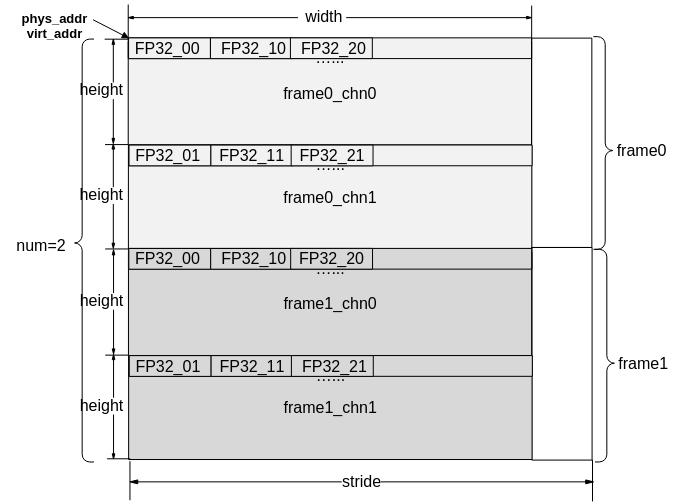
图 15 OT_SVP_BLOB_TYPE_FP16类型ot_svp_blob(2通道2帧示意图)
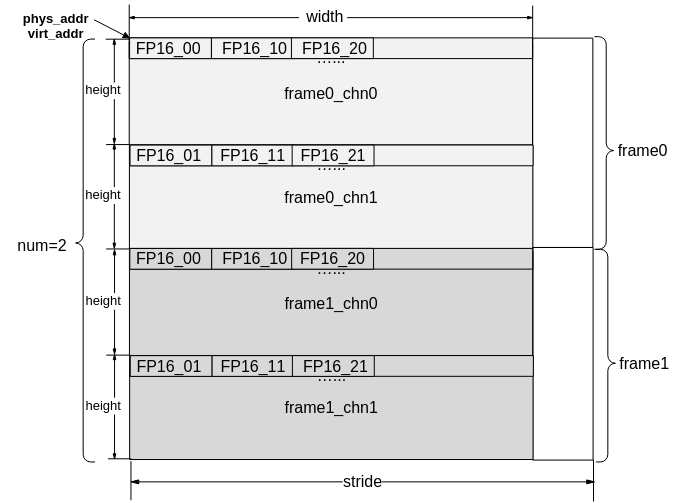
图 16 OT_SVP_BLOB_TYPE_S8类型ot_svp_blob(2通道2帧示意图)
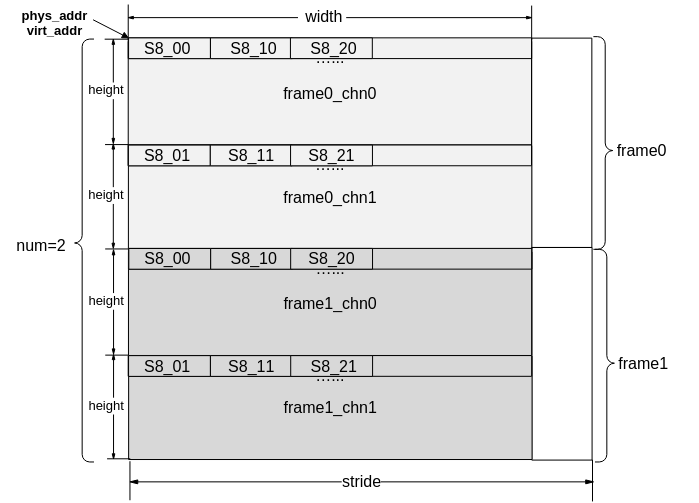
图 17 OT_SVP_BLOB_TYPE_S16类型ot_svp_blob(2通道2帧示意图)
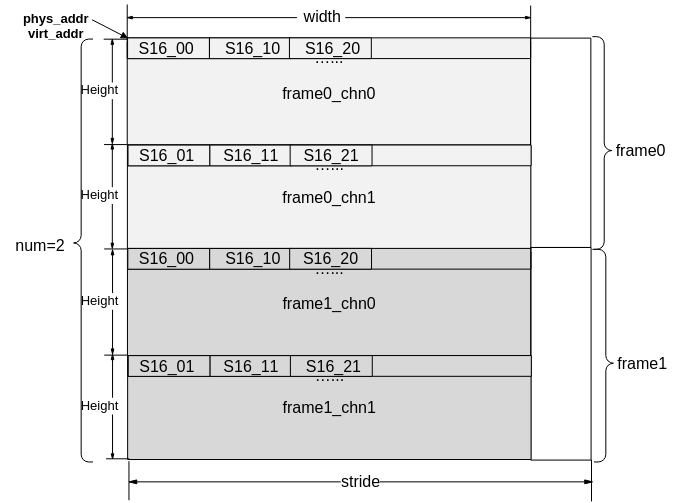
图 18 OT_SVP_BLOB_TYPE_U16类型ot_svp_blob(2通道2帧示意图)
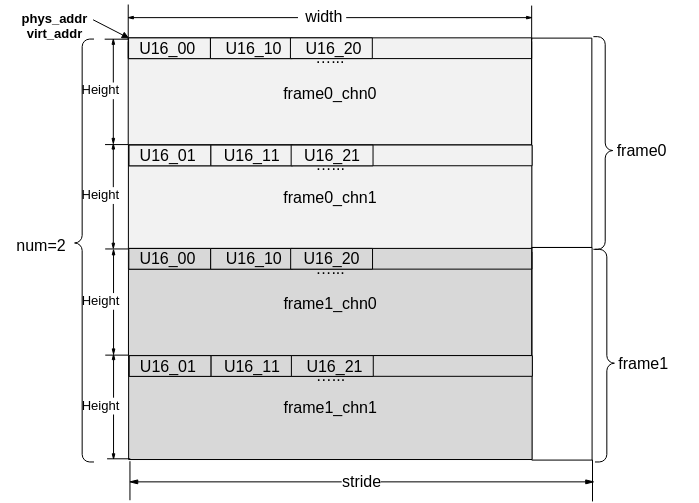
图 19 ot_svp_mem_info 类型的数据内存示意

使用示意¶
用户根据需求调用相应的算子接口创建任务,指定is_instant类型,并记录该任务返回的handle号。
根据返回的handle号,指定阻塞方式,可以查询到该任务的完成状态。
API参考¶
MAU模块提供了创建任务和查询任务的基本接口。
ss_mpi_svp_mau_matrix_mul:计算矩阵乘积。
ss_mpi_svp_mau_cos_dist:计算余弦距离。
ss_mpi_svp_mau_euclid_dist:计算欧式距离。
ss_mpi_svp_mau_manhattan_dist:计算曼哈顿距离。
ss_mpi_svp_mau_transpose:计算矩阵转置运算。
ss_mpi_svp_mau_vector_op:计算向量加减及加减绝对值运算。
ss_mpi_svp_mau_type_convert:计算矩阵数据类型FP32和FP16相互转换。
ss_mpi_svp_mau_get_sort_tmpbuf_size:获取排序运算辅助内存字节数。
ss_mpi_svp_mau_sort:计算矩阵每一行数据进行排序。
ss_mpi_svp_mau_get_fir_tmpbuf_size:获取快速图像检索辅助内存字节数。
ss_mpi_svp_mau_fir:快速图像检索。
ss_mpi_svp_mau_query:查询任务是否完成。
ss_mpi_svp_mau_add_mem_info:记录内存地址信息。
ss_mpi_svp_mau_rm_mem_info:移除内存地址信息。
ss_mpi_svp_mau_matrix_mul¶
【描述】
计算矩阵乘积。
【语法】
td_s32 ss_mpi_svp_mau_matrix_mul(ot_svp_mau_handle *handle, const ot_svp_mau_src_double_matrix *src, const ot_svp_mau_src_double_matrix *src_idx, const ot_svp_mau_ctrl *ctrl, const ot_svp_dst_blob *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
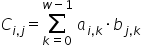
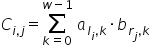
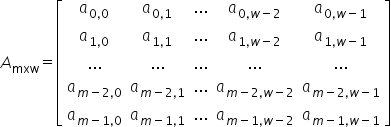
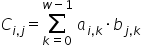
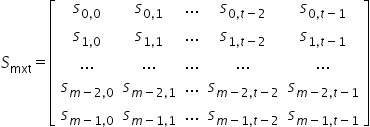
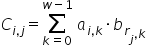
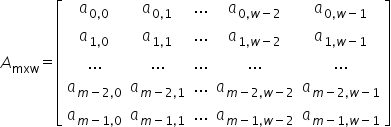
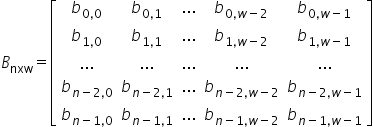
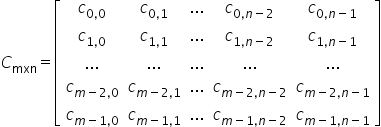
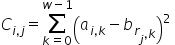
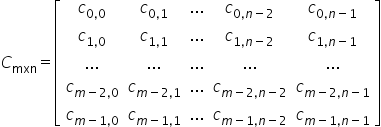
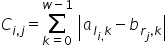
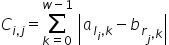
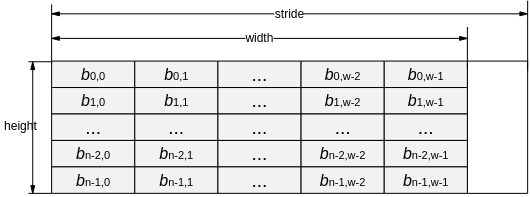
输入右矩阵B的数据在内存中需要按照列优先排布,所以右矩阵B和左矩阵A的宽相等,计算公式如下:


其中:
支持通过索引指定要计算的行向量,分三种情况:
左矩阵A通过索引指定,右矩阵不用索引,计算公式:

其中:

 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ), 为左矩阵,
), 为左矩阵, 为右矩阵,
为右矩阵, 为计算结果。
为计算结果。左矩阵A不用索引,右矩阵用索引指定要计算的行向量,计算公式:

其中:

 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为计算结果。
为计算结果。左矩阵A用索引指定要计算的行向量,右矩阵B用索引指定要计算的行向量,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为计算结果。
为计算结果。
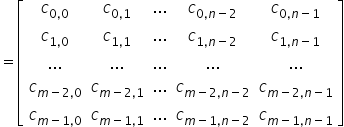
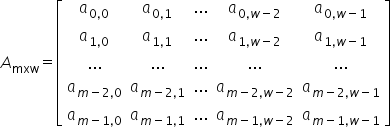
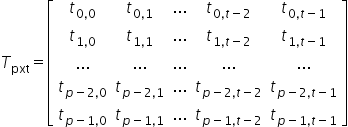
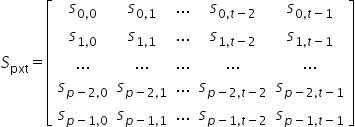
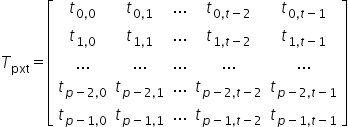
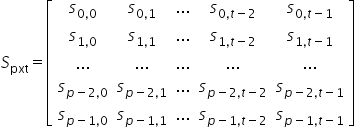
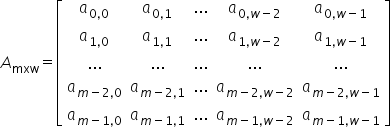
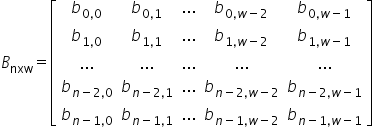
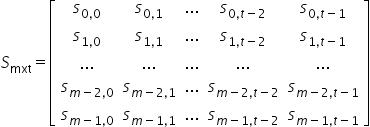
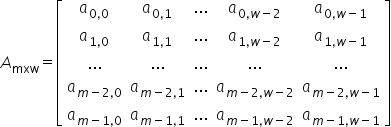
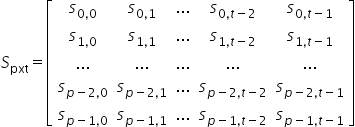
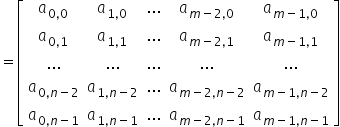
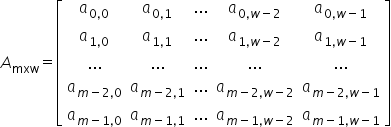
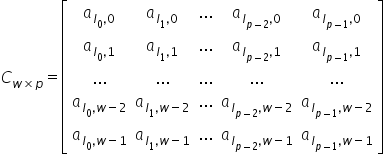
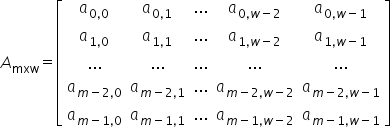
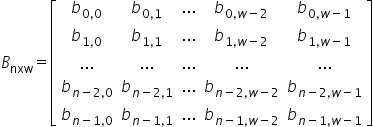
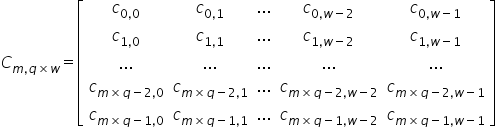
输入右矩阵B的数据在内存中需要按照列优先排布,左矩阵A和右矩阵B在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
ctrl->out_type仅支持OT_SVP_MAU_OUT_OP_RESULT。ctrl->has_left_idx,ctrl->has_right_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_left_idx等于TD_TRUE,src_idx->left_matrix的宽取值范围:[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,src_idx->left_matrix的内存中存储的索引值必须小于src->left_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->has_right_idx等于TD_TRUE,src_idx->right_matrix的宽取值范围为[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,src_idx->right_matrix的内存中存储的索引值必须小于src->right_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
dst的chn必须等于1,num必须为1,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐;dst的宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst的高必须等于src->left_matrix的高,dst的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst的高必须等于src_idx->left_matrix的宽,dst的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst的高必须等于src->left_matrix的高,dst的宽必须等于src_idx->right_matrix的宽。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst的高必须等于src_idx->left_matrix的宽,dst的宽必须等于src_idx->right_matrix的宽。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_cos_dist¶
【描述】
计算余弦距离。
【语法】
td_s32 ss_mpi_svp_mau_cos_dist(ot_svp_mau_handle *handle, const ot_svp_mau_src_double_matrix *src, const ot_svp_mau_src_double_matrix *src_idx, const ot_svp_mau_ctrl *ctrl, const ot_svp_mau_dist_result *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
用户需要对输入的左右矩阵中的行向量做单位化处理,否则可能会计算结果不正确。
支持多向量求余弦距离,Height表示向量个数,依次获取左矩阵A的行向量与右矩阵B中每个行向量进行计算,计算公式:

其中:



 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从大到小排序后的前Top t个,
矩阵中对应行中从大到小排序后的前Top t个, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的余弦距离。
个行向量的余弦距离。支持通过索引指定要计算的行向量,分三种情况:
左矩阵A通过索引指定要计算的行向量,右矩阵不用索引,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从大到小排序后的前Top t个值,
矩阵中对应行中从大到小排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第
中第 个行向量的余弦距离。
个行向量的余弦距离。左矩阵A不用索引,右矩阵用索引指定要计算的行向量,计算公式:

其中:



 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从大到小排序后的前Top t个值,
矩阵中对应行中从大到小排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的余弦距离。
个行向量的余弦距离。左矩阵A用索引指定要计算的行向,右矩阵B用索引指定要计算的行向量,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从大到小排序后的前Top t个值,
矩阵中对应行中从大到小排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第
中第 个行向量的余弦距离。
个行向量的余弦距离。
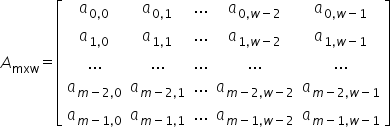
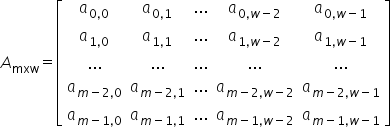
左矩阵A和右矩阵B在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
ctrl->out_type可支持OT_SVP_MAU_OUT_OP_RESULT,OT_SVP_MAU_OUT_TOP_N和OT_SVP_MAU_OUT_BOTH。ctrl->has_left_idx,ctrl->has_right_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_left_idx等于TD_TRUE,src_idx->left_matrix的宽取值范围:[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->left_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->has_right_idx等于TD_TRUE,src_idx->right_matrix的宽取值范围为[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->right_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->out_type为OT_SVP_MAU_OUT_OP_RESULT或者OT_SVP_MAU_OUT_BOTH,dst-> op_result的chn必须等于1,num必须为1,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐;dst-> op_result的宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n的chn必须等于1,num必须为1,stride需要16字节对齐,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查;dst-> top_n的宽表示输出从大到小排序后的前Top_n个余弦距离,最大只能输出Top 32。具体宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n_idx的chn必须等于1,num必须为1,stride需要16字节对齐,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,数据类型必须为OT_SVP_BLOB_TYPE_U32,宽高必须与dst-> top_n的宽高相等。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_euclid_dist¶
【描述】
计算欧式距离。
【语法】
td_s32 ss_mpi_svp_mau_euclid_dist(ot_svp_mau_handle *handle, const ot_svp_mau_src_double_matrix *src, const ot_svp_mau_src_double_matrix *src_idx, const ot_svp_mau_ctrl *ctrl, const ot_svp_mau_dist_result *dst);
【参数】
【解决方案差异】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
支持多向量求欧氏距离,Height表示向量个数,依次获取左矩阵A的行向量与右矩阵中每个行向量进行计算,计算公式:

其中:

 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个,
矩阵中对应行中从小到大排序后的前Top t个, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的欧式距离。
个行向量的欧式距离。支持通过索引指定要计算的行向量,分三种情况:
左矩阵A通过索引指定要计算的行向量,右矩阵不用索引,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第
中第 个行向量的欧式距离。
个行向量的欧式距离。左矩阵A不用索引,右矩阵用索引指定要计算的行向量,计算公式:

其中:


 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的欧式距离。
个行向量的欧式距离。左矩阵A用索引指定要计算的行向,右矩阵B用索引指定要计算的行向量,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第
中第 个行向量的欧式距离。
个行向量的欧式距离。
左矩阵A和右矩阵B在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果中数值为INF、-INF或NAN,从而使结果数值失去意义。
ctrl->out_type可支持OT_SVP_MAU_OUT_OP_RESULT,OT_SVP_MAU_OUT_TOP_N和OT_SVP_MAU_OUT_BOTH。ctrl->has_left_idx,ctrl->has_right_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_left_idx等于TD_TRUE,src_idx->left_matrix的宽取值范围:[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->left_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->has_right_idx等于TD_TRUE,src_idx->right_matrix的宽取值范围为[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->right_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->out_type为OT_SVP_MAU_OUT_OP_RESULT或者OT_SVP_MAU_OUT_BOTH,dst-> op_result的chn必须等于1,num必须为1,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐;dst-> op_result的宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n的chn必须等于1,num必须为1,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐;dst-> top_n的宽表示输出从小到大排序后的前Top_n个欧式距离,最大只能输出Top 32。具体宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n_idx的chn必须等于1,num必须为1,stride需要16字节对齐,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,数据类型必须为OT_SVP_BLOB_TYPE_U32,宽高必须与dst-> top_n的宽高相等。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_manhattan_dist¶
【描述】
计算曼哈顿距离。
【语法】
td_s32 ss_mpi_svp_mau_manhattan_dist(ot_svp_mau_handle *handle, const ot_svp_mau_src_double_matrix *src, const ot_svp_mau_src_double_matrix *src_idx, const ot_svp_mau_ctrl *ctrl, const ot_svp_mau_dist_result *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
支持多向量求曼哈顿距离,Height表示向量个数,依次获取左矩阵A的行向量与右矩阵中每个行向量进行计算,计算公式:

其中:
 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个,
矩阵中对应行中从小到大排序后的前Top t个, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的曼哈顿距离。
个行向量的曼哈顿距离。支持通过索引指定要计算的行向量,分三种情况:
左矩阵A通过索引指定要计算的行向量,右矩阵不用索引,计算公式:

其中:


 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第中第
中第中第 个行向量的曼哈顿距离。
个行向量的曼哈顿距离。左矩阵A不用索引,右矩阵用索引指定要计算的行向量,计算公式:

其中:

 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第i个行向量与
中第i个行向量与 中第
中第 个行向量的曼哈顿距离。
个行向量的曼哈顿距离。左矩阵A用索引指定要计算的行向,右矩阵B用索引指定要计算的行向量,计算公式:

其中:





 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵,
为结果矩阵, 为Top_n矩阵,每一行中的数值为
为Top_n矩阵,每一行中的数值为 矩阵中对应行中从小到大排序后的前Top t个值,
矩阵中对应行中从小到大排序后的前Top t个值, 为Top_n索引矩阵,
为Top_n索引矩阵, 的值是
的值是 中第
中第 个行向量与
个行向量与 中第
中第 个行向量的曼哈顿距离。
个行向量的曼哈顿距离。
左矩阵A和右矩阵B在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果中数值为INF、-INF或NAN,从而使结果数值失去意义。
ctrl->out_type可支持OT_SVP_MAU_OUT_OP_RESULT,OT_SVP_MAU_OUT_TOP_N和OT_SVP_MAU_OUT_BOTH。ctrl->has_left_idx,ctrl->has_right_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_left_idx等于TD_TRUE,src_idx->left_matrix的宽取值范围[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,内存中存储的索引必须小于src->left_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->has_right_idx等于TD_TRUE,src_idx->right_matrix的宽取值范围为[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->right_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->out_type为OT_SVP_MAU_OUT_OP_RESULT或者OT_SVP_MAU_OUT_BOTH,dst-> op_result的chn必须等于1,num必须为1,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16,当ctrl->out_type为OT_SVP_MAU_OUT_BOTH时,dst->top_n和dst-> op_result数据类型必须一致;数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,dst-> op_result的宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src->right_matrix的高。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src->left_matrix的高,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> op_result的高必须等于src_idx->left_matrix的宽,dst-> op_result的宽必须等于src_idx->right_matrix的宽。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n的chn必须等于1,num必须为1;数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP32,当ctrl->out_type为OT_SVP_MAU_OUT_BOTH时,dst->top_n和dst-> op_result数据类型必须一致;数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐;dst-> top_n的宽表示输出从小到大排序后的前Top_n个欧式距离,最大只能输出Top 32。具体宽和高要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src->right_matrix.shape.whc.height,32)]。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src->left_matrix的高,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst-> top_n的高必须等于src_idx->left_matrix的宽,dst-> top_n的宽取值范围为[1,min(src_idx->right_matrix.shape.whc.width,32)]。
如果ctrl->out_type为OT_SVP_MAU_OUT_TOP_N或者OT_SVP_MAU_OUT_BOTH,dst-> top_n_idx的chn必须等于1,num必须为1,stride需要16字节对齐,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,数据类型必须为OT_SVP_BLOB_TYPE_U32,宽高必须与dst-> top_n的宽高相等。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_transpose¶
【描述】
计算矩阵转置运算。
【语法】
td_s32 ss_mpi_svp_mau_transpose(ot_svp_mau_handle *handle, const ot_svp_blob *src, const ot_svp_blob *src_idx, const ot_svp_mau_transpose_ctrl *ctrl, const ot_svp_blob *dst);
【参数】
注:FP32,U32,S32,FP16,U16,S16时,2字节对齐;U8,S8均为ot_svp_blob_type成员的缩写,后续其他的成员在表述中也用相同的规则简写
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
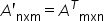
计算公式如下:
其中:

支持通过索引指定要计算的行向量:
矩阵A通过索引指定,计算公式:

其中:


 为输入矩阵,
为输入矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为计算结果。
为计算结果。
输入矩阵A在内存中的数据排布如下:

用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
ctrl->has_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_idx等于TD_TRUE,src_idx的宽取值范围[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,src_idx的内存中存储的索引值必须小于src的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
dst的chn必须等于1,num必须为1;物理地址按数据类型对齐,FP32,U32,S32时,4字节对齐;FP16,U16,S16时,2字节对齐;U8,S8时,1字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,数据类型必须与输入矩阵类型一致,dst的宽和高要求可分为以下2种情况:
如果ctrl->has_idx等于TD_FALSE,dst的高必须等于src的宽,dst的宽必须等于src的高。
如果ctrl->has_idx等于TD_TRUE,dst的高必须等于src的宽,dst的宽必须等于src_idx的宽。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_vector_op¶
【描述】
计算向量加减及加减绝对值运算。
【语法】
td_s32 ss_mpi_svp_mau_vector_op(ot_svp_mau_handle *handle, const ot_svp_mau_src_double_matrix *src, const ot_svp_mau_src_double_matrix *src_idx, const ot_svp_mau_vector_op_ctrl *ctrl, const ot_svp_blob *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
支持多向量加减运算,Height表示向量个数,依次获取左矩阵A的行向量与右矩阵B中每个行向量进行计算,所以左矩阵A和右矩阵B的宽必须相等,计算公式:

其中:
向量相减运算:

向量相减的绝对值运算:

向量相加运算:

向量相加的绝对值运算:

 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为结果矩阵。
为结果矩阵。支持通过索引指定要计算的行向量,分三种情况:
左矩阵A通过索引指定要计算的行向量,右矩阵不用索引,计算公式:

其中:

向量相减运算:
向量相减的绝对值运算:
向量相加运算:

向量相加的绝对值运算:
 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为结果矩阵。
为结果矩阵。左矩阵A不用索引,右矩阵用索引指定要计算的行向量,计算公式:

其中:

向量相减运算:

向量相减的绝对值运算:

向量相加运算:

向量相加的绝对值运算:

 为左矩阵,
为左矩阵, 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵。
为结果矩阵。左矩阵A用索引指定要计算的行向,右矩阵B用索引指定要计算的行向量,计算公式:

其中:



向量相减运算:

向量相减的绝对值运算:
向量相加运算:

向量相加的绝对值运算:
 为左矩阵,
为左矩阵, 为左矩阵索引(
为左矩阵索引( ),
), 为右矩阵,
为右矩阵, 为右矩阵索引(
为右矩阵索引( ),
), 为结果矩阵。
为结果矩阵。左矩阵A和右矩阵B在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
ctrl->has_left_idx,ctrl->has_right_idx和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_left_idx等于TD_TRUE,src_idx->left_matrix的宽取值范围[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->left_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
如果ctrl->has_right_idx等于TD_TRUE,src_idx->right_matrix的宽取值范围为[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride 需要16字节对齐,内存中存储的索引必须小于src->right_matrix的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
dst的chn必须等于1,宽等于左右矩阵的宽;数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,dst的高和num要求可分为以下4种情况:
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_FALSE,dst的高必须等于src->right_matrix的高,dst的num必须等于src->left_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_FALSE,dst的高必须等于src>right_matrix的高,dst的num必须等于src_idx->left_matrix的宽。
如果ctrl->has_left_idx等于TD_FALSE,ctrl->has_right_idx等于TD_TRUE,dst的高必须等于src_idx->right_matrix的宽,dst的num必须等于src ->left_matrix的高。
如果ctrl->has_left_idx等于TD_TRUE,ctrl->has_right_idx等于TD_TRUE,dst的高必须等于src_idx->right_matrix的宽,dst的num必须等于src_idx->left_matrix的宽。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_type_convert¶
【描述】
计算矩阵数据类型FP32和FP16相互转换。
【语法】
td_s32 ss_mpi_svp_mau_type_convert(ot_svp_mau_handle *handle, const ot_svp_blob *src, const ot_svp_blob *src_idx, const ot_svp_mau_type_convert_ctrl *ctrl, const ot_svp_blob *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
输入矩阵内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
ctrl->has_idx,和ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
如果ctrl->has_ idx等于TD_TRUE,src_idx的宽取值范围[1, 100000],高必须为1,chn必须为1,num必须为1,物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,src_idx的内存中存储的索引值必须小于src的高,数据类型仅支持OT_SVP_BLOB_TYPE_U32。
dst的chn必须等于1,num必须为1,宽必须等于src的宽,数据类型为OT_SVP_BLOB_TYPE_FP32或OT_SVP_BLOB_TYPE_FP32;数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需要2字节对齐;虚拟地址不使用,不做参数异常检查,stride需要16字节对齐;dst的宽和高要求可分为以下两种情况:
如果ctrl->has_idx等于TD_FALSE,dst的高必须等于src的高。
如果ctrl->has_idx等于TD_TRUE,dst的高必须等于src_idx的宽。

【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_get_sort_tmpbuf_size¶
【描述】
获取排序运算辅助内存字节数。
【语法】
td_s32 ss_mpi_svp_mau_get_sort_tmpbuf_size(ot_svp_blob_type type, td_u32 src_col, td_u32 *size);
【参数】
排序元素数据类型,数据类型支持OT_SVP_BLOB_TYPE_FP32,OT_SVP_BLOB_TYPE_FP16,OT_SVP_BLOB_TYPE_U32,OT_SVP_BLOB_TYPE_S32, OT_SVP_BLOB_TYPE_U16,OT_SVP_BLOB_TYPE_S16,OT_SVP_BLOB_TYPE_U8,OT_SVP_BLOB_TYPE_S8。 |
||
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
该接口与ss_mpi_svp_mau_sort配套使用,type和src_col与ss_mpi_svp_mau_sort参数中src->data_matrix的type及width应一致。
【举例】
无。
【相关主题】
ss_mpi_svp_mau_sort¶
【描述】
计算矩阵每一行数据进行排序。
【语法】
td_s32 ss_mpi_svp_mau_sort(ot_svp_mau_handle *handle, const ot_svp_mau_sort_matrix*src, const ot_svp_blob *src_idx, const ot_svp_mau_sort_ctrl *ctrl, const ot_svp_mau_sort_result *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
矩阵A在内存中的数据排布如下:

ss_mpi_svp_mau_get_fir_tmpbuf_size¶
【描述】
获取快速图像检索辅助内存字节数。
【语法】
td_s32 ss_mpi_svp_mau_get_fir_tmpbuf_size (const ot_svp_mau_fir_src *src, td_u32 bucket_num, td_u32 sub_vec_num, td_u32 *size);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
src->query_item的chn必须为1,num必须为1,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->bucket_center的chn必须为1,num必须为1,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->dict_info的chn必须为1,num必须为1,height取值范围为[1, 256];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src-> bucket_info的chn必须为1,num必须为1,width必须为4,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_U32;物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->query_item,src->bucket_center和src->dict_info的width必须一致,数据类型必须一致。
src->query_item,src->bucket_center和src->dict_info的width必须是ctrl->sub_vec_num乘于8的倍数。
src->bucket_center和src->bucket_info的height必须一致。
bucket_num取值范围为[1, src->bucket_center.shape.whc.height]。
【举例】
无。
【相关主题】
ss_mpi_svp_mau_fir¶
【描述】
快速图像检索。
【语法】
ss_mpi_svp_mau_fir(ot_svp_mau_handle *handle, const ot_svp_mau_fir_src *src, const ot_svp_mau_fir_ctrl *ctrl, const ot_svp_mau_fir_result *dst);
【参数】
【返回值】
失败,参见错误码。 |
【解决方案差异】
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
矩阵在内存中的数据排布如下:
用户需要确保输入左右矩阵的数据中不能含有INF、-INF或者NAN数据,并且输入数值和计算结果都在fp32数据表示有效范围内,否则会导致输出的结果数值中有INF、-INF或NAN,从而使结果数值失去意义。
src->query_item的chn必须为1,num必须为1,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->bucket_center的chn必须为1,num必须为1,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->dict_info的chn必须为1,num必须为1,height取值范围为[1, 256];数据类型仅支持OT_SVP_BLOB_TYPE_FP32和OT_SVP_BLOB_TYPE_FP16;数据类型为FP32时,width取值范围为[1, 8192],数据类型为FP16时,width取值范围为[1,16384];数据类型为FP32时,物理地址需要4字节对齐,数据类型为FP16时,物理地址需2字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->bucket_info的chn必须为1,num必须为1,width必须为4,height取值范围为[1, 65535];数据类型仅支持OT_SVP_BLOB_TYPE_U32;物理地址需要4字节对齐,虚拟地址不使用,不做参数异常检查;stride需要16字节对齐。
src->query_item,src->bucket_center和src->dict_info的width必须一致,数据类型必须一致。
src->query_item,src->bucket_center和src->dict_info的width必须是ctrl->sub_vec_num乘于8的倍数。
src->bucket_center和src->bucket_info的height必须一致。
ctrl->is_instant值必须为TD_TRUE或TD_FALSE。
ctrl->bucket_num取值范围为[1, src->bucket_center.shape.whc.height]。
ctrl->feature_db的物理地址必须16字节对齐,虚拟地址不使用,不做参数异常检查。
ctrl->id_db的物理地址必须16字节对齐,虚拟地址不使用,不做参数异常检查。
ctrl->tmp_buf的物理地址必须16字节对齐,虚拟地址不使用,不做参数异常检查,size大于或者等于ss_mpi_svp_mau_get_fir_tmpbuf_size计算结果。
dst->top_n的chn必须等于1,num必须为1,height等于src->query_item.shape.whc.height,width的取值范围为[1, 1024],物理地址4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,数据类型必须为OT_SVP_BLOB_TYPE_FP32。
dst->top_n_idx的chn必须等于1,num必须为1,物理地址4字节对齐,虚拟地址不使用,不做参数异常检查,stride需要16字节对齐,数据类型必须为OT_SVP_BLOB_TYPE_U32,dst->top_n_idx的宽和高必须与dst->top_n一致。
dst->top_n的值为U32的最大值(0xFFFFFFFF)时,表示检索结果不足dst->top_n.shape.whc.with。

【举例】
无。
【相关主题】
ss_mpi_svp_mau_query¶
【描述】
任务状态查询。
【语法】
td_s32 ss_mpi_svp_mau_query(ot_svp_mau_id mau_id, ot_svp_mau_handle handle, td_bool *is_finish, td_bool is_block);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
输入的handle必须为调用ss_mpi_svp_mau_matrix_mul,ss_mpi_svp_mau_cos_dist或者ss_mpi_svp_mau_euclid_dist函数返回的handle。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_add_mem_info¶
【描述】
记录内存信息。
【语法】
td_s32 ss_mpi_svp_mau_add_mem_info(const ot_svp_mem_info * mem_info);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
记录内存地址信息,用于减少内核态内存映射次数,提升效率。
内存地址信息的记录是通过链表进行管理,链表长度默认值为32,链表长度可通过模块参数mau_max_mem_info_num进行配置。
若没有调用ss_mpi_svp_mau_add_mem_info预先把索引矩阵地址信息记录到系统,那么在之后计算中每次都会Map/Unmap操作索引矩阵内核态的虚拟地址,效率会比较低。
必须与ss_mpi_svp_mau_rm_mem_info成对匹配使用。
建议先把矩阵运算要用到的索引矩阵地址信息调用此接口记录到系统。当不再使用时调用ss_mpi_svp_mau_rm_mem_info把索引矩阵地址信息移除。只需要在初始化时把索引矩阵地址信息记录,后续可以直接使用,直到不再使用时才移除。
物理地址4字节对齐。
mem_info ->virt_addr不使用,不做参数异常检查。
mem_info ->size不能为0。
mem_info内存由用户释放,记录的mem info内存要在移除后才能被释放。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_mau_rm_mem_info¶
【描述】
移除内存信息。
【语法】
td_s32 ss_mpi_svp_mau_rm_mem_info (const ot_svp_mem_info* mem_info);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_mau.h、ss_mpi_mau.h
库文件:libss_mau.a
【注意】
如果mem info不再使用,需要将记录的mem info地址信息从链表中移除。
必须与ss_mpi_svp_mau_add_mem_info成对匹配使用。
物理地址4字节对齐。
mem_info ->virt_addr不使用,不做参数异常检查。
mem_info ->size不能为0。
mem info内存由用户释放,记录的mem info内存要在移除后才能被释放。
【举例】
无。
【相关主题】
无。
数据类型和数据结构¶
MAU相关数据类型、数据结构定义如下:
ot_svp_blob_type¶
【说明】
定义blob的数据内存排布。
【定义】
typedef enum {
OT_SVP_BLOB_TYPE_S20Q12 = 0x0,
OT_SVP_BLOB_TYPE_U8 = 0x1,
OT_SVP_BLOB_TYPE_YVU420SP = 0x2, /* channel = 3 */
OT_SVP_BLOB_TYPE_YVU422SP = 0x3, /* channel = 3 */
OT_SVP_BLOB_TYPE_VEC_S20Q12 = 0x4,
OT_SVP_BLOB_TYPE_SEQ_S20Q12 = 0x5,
OT_SVP_BLOB_TYPE_BBOX_S20Q12 = 0x6,
OT_SVP_BLOB_TYPE_BSI_SQ32 = 0x7,
OT_SVP_BLOB_TYPE_S12Q20 = 0x8,
OT_SVP_BLOB_TYPE_VEC_S12Q20 = 0x9,
OT_SVP_BLOB_TYPE_S32 = 0xa,
OT_SVP_BLOB_TYPE_U32 = 0xb,
OT_SVP_BLOB_TYPE_FP32 = 0xc,
OT_SVP_BLOB_TYPE_FP16 = 0xd,
OT_SVP_BLOB_TYPE_S8 = 0xe,
OT_SVP_BLOB_TYPE_S16 = 0xf,
OT_SVP_BLOB_TYPE_U16 = 0x10,
OT_SVP_BLOB_TYPE_BUTT
}ot_svp_blob_type;
【成员】
Blob数据元素为S20Q12类型,参考图2 |
|
Blob数据元素为U8类型,参考图3 |
|
Blob数据内存排布为YVU420SP,参考图4。 |
|
Blob数据内存排布为YVU422SP,参考图5。 |
|
Blob中存储向量,每个元素为S20Q12类型,参考图6。 |
|
Blob中存储序列,数据元素为S20Q12类型,排布见图7。 |
|
Blob中存储坐标,数据元素为S20Q12类型,排布见图8。 |
|
Blob中存储坐标、分值和类别,数据元素为32bit的量化数据,排布见图9。 |
|
Blob数据元素为S12Q20类型,参考图10 |
|
Blob中存储向量,每个元素为S12Q20类型,参考图11。 |
|
Blob数据元素为32bit有符号整型,参考图12 |
|
Blob数据元素为32bit无符号整型,参考图13 |
|
Blob数据元素为32bit浮点型,参考图14 |
|
Blob数据元素为16bit浮点型,参考图15 |
|
Blob数据元素为8bit有符号整型,参考图16 |
|
Blob数据元素为16bit有符号整型,参考图17 |
|
Blob数据元素为16bit无符号整型,参考图18 |
【注意事项】
无。
【相关数据类型及接口】
ot_svp_blob¶
【说明】
定义多个连续存放的blob信息。
【定义】
typedef struct {
ot_svp_blob_type type;
td_u32 stride;
td_u64 virt_addr;
td_u64 phys_addr;
td_u32 num;
union {
struct {
td_u32 width;
td_u32 height;
td_u32 chn;
} whc;
struct {
td_u32 dim;
td_u64 virt_addr_step;
} seq;
} shape;
} ot_svp_blob;
【成员】
【注意事项】
无。
【相关数据类型及接口】
ot_svp_src_blob¶
【说明】
定义源序列。
【定义】
typedef ot_svp_blob ot_svp_src_blob;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_dst_blob¶
【说明】
定义输出序列。
【定义】
typedef ot_svp_blob ot_svp_dst_blob;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mem_info¶
【说明】
定义一维内存信息。
【定义】
typedef struct {
td_u64 phys_addr;
td_u64 virt_addr;
td_u32 size;
} ot_svp_mem_info;
【成员】
内存块字节数。见图19。 |
【注意事项】
无。
【相关数据类型及接口】
ot_svp_src_mem_info¶
【说明】
定义一维输入内存信息。
【定义】
typedef ot_svp_mem_info ot_svp_src_mem_info;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_dst_mem_info¶
【说明】
定义一维输出内存信息。
【定义】
typedef ot_svp_mem_info ot_svp_dst_mem_info;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mau_handle¶
【说明】
定义MAU的句柄。
【定义】
typedef td_s32 ot_svp_mau_handle;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_double_matrix¶
【说明】
定义左右矩阵信息。
【定义】
typedef struct {
ot_svp_blob left_matrix; /* RW;left matrix */
ot_svp_blob right_matrix; /* RW;right matrix */
} ot_svp_mau_double_matrix;
【成员】
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mau_src_double_matrix¶
【说明】
定义输入左右矩阵信息。
【定义】
typedef ot_svp_mau_double_matrix ot_svp_mau_src_double_matrix;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mau_out_type¶
【说明】
定义输出结果类型。
【定义】
typedef enum {
OT_SVP_MAU_OUT_OP_RESULT = 0x0,
OT_SVP_MAU_OUT_TOP_N = 0x1,
OT_SVP_MAU_OUT_BOTH = 0x2,
OT_SVP_MAU_OUT_BUTT
} ot_svp_mau_out_type;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_id¶
【说明】
定义MAU核ID。
【定义】
typedef enum {
SVP_MAU_ID_0 = 0x0;
SVP_MAU_ID_BUTT
} ot_svp_mau_id;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_ctrl¶
【说明】
定义MAU控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
ot_svp_mau_out_type out_type;
td_bool fp32_to_fp16_en;
td_bool has_left_idx;
td_bool has_right_idx;
td_bool is_instant;
} ot_svp_mau_ctrl;
【成员】
【注意事项】
如果输入左矩阵数据类型为fp32,右矩阵数据类型为fp16,fp32_to_fp16_en必须为TD_TRUE。
如果输入左矩阵数据类型为fp16,右矩阵数据类型为fp32,fp32_to_fp16_en必须为TD_TRUE。
如果输入左矩阵数据类型为fp16,右矩阵数据类型为fp16,fp32_to_fp16_en必须为TD_FALSE。
如果输入左矩阵数据类型为fp32,右矩阵数据类型为fp32,fp32_to_fp16_en可以为TD_TRUE或TD_FALSE。
【相关数据类型及接口】
ot_svp_mau_dist_result¶
【说明】
定义矩阵距离结果。
【定义】
typedef struct {
ot_svp_blob op_result;
ot_svp_blob top_n;
ot_svp_blob top_n_idx;
} ot_svp_mau_dist_result;
【成员】
【注意事项】
op_result数据类型必须为OT_SVP_BLOB_TYPE_FP32。
top_n数据类型必须为OT_SVP_BLOB_TYPE_FP32。
top_n_idx数据类型必须为OT_SVP_BLOB_TYPE_U32。
【相关数据类型及接口】
ot_svp_mau_mod_param¶
【说明】
模块参数。
【定义】
typedef struct {
td_u16 mau_max_mem_info_num;
td_u16 mau_max_node_num;
td_u8 mau_power_save_en;
td_u8 reserved;
} ot_svp_mau_mod_param;
【成员】
【注意事项】
如果传入的模块参数数值超过取值范围,驱动会使用默认的模块参数值进行初始化。
【相关数据类型及接口】
无。
ot_svp_mau_transpose_ctrl¶
【说明】
定义矩阵转置控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
td_bool has_idx;
td_bool is_instant;
} ot_svp_mau_transpose_ctrl;
【成员】
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mau_vector_op_mode¶
【说明】
定义向量运算模式。
【定义】
typedef enum {
OT_SVP_MAU_VECTOR_OP_MODE_SUB = 0x0,
OT_SVP_MAU_VECTOR_OP_MODE_SUB_ABS = 0x1,
OT_SVP_MAU_VECTOR_OP_MODE_ADD = 0x2,
OT_SVP_MAU_VECTOR_OP_MODE_ADD_ABS = 0x3,
OT_SVP_MAU_VECTOR_OP_MODE_BUTT
} ot_svp_mau_vector_op_mode;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_vector_op_ctrl¶
【说明】
定义向量运算控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
ot_svp_mau_vector_op_mode mode;
td_bool fp32_to_fp16_en;
td_bool has_left_idx;
td_bool has_right_idx;
td_bool is_instant;
} ot_svp_mau_vector_op_ctrl;
【成员】
【注意事项】
如果输入左矩阵数据类型为fp32,右矩阵数据类型为fp16,fp32_to_fp16_en必须为TD_TRUE。
如果输入左矩阵数据类型为fp16,右矩阵数据类型为fp32,fp32_to_fp16_en必须为TD_TRUE。
如果输入左矩阵数据类型为fp16,右矩阵数据类型为fp16,fp32_to_fp16_en必须为TD_FALSE。
如果输入左矩阵数据类型为fp32,右矩阵数据类型为fp32,fp32_to_fp16_en可以为TD_TRUE或TD_FALSE。
【相关数据类型及接口】
ot_svp_mau_type_convert_mode¶
【说明】
定义数据类型转换模式。
【定义】
typedef enum {
OT_SVP_MAU_TYPE_CONVERT_MODE_FP32_TO_FP16 = 0x0,
OT_SVP_MAU_TYPE_CONVERT_MODE_FP16_TO_FP32 = 0x1,
OT_SVP_MAU_TYPE_CONVERT_MODE_BUTT
} ot_svp_mau_type_convert_mode;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_type_convert_ctrl¶
【说明】
定义数据类型转换控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
ot_svp_mau_type_convert_mode mode;
td_bool has_idx;
td_bool is_instant;
} ot_svp_mau_type_convert_ctrl;
【成员】
【注意事项】
如果输入矩阵数据类型为fp32,输出矩阵数据类型必须为fp16,mode必须为OT_SVP_MAU_TYPE_CONVERT_MODE_FP32_TO_FP16。
如果输入矩阵数据类型为fp16,输出矩阵数据类型必须为fp32,mode必须为OT_SVP_MAU_TYPE_CONVERT_MODE_FP16_TO_FP32。
【相关数据类型及接口】
ot_svp_mau_sort_mode¶
【说明】
定义排序模式。
【定义】
typedef enum {
OT_SVP_MAU_SORT_MODE_DESC = 0x0,
OT_SVP_MAU_SORT_MODE_ASC = 0x1,
OT_SVP_MAU_SORT_MODE_BUTT
} ot_svp_mau_sort_mode;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_mau_sort_matrix¶
【说明】
定义排序矩阵信息。
【定义】
typedef struct {
ot_svp_blob data_matrix;
ot_svp_blob id_matrix;
} ot_svp_mau_sort_matrix;
【成员】
【注意事项】
data_matrix数据类型为OT_SVP_BLOB_TYPE_FP32,OT_SVP_BLOB_TYPE_FP16, OT_SVP_BLOB_TYPE_U32, OT_SVP_BLOB_TYPE_S32, OT_SVP_BLOB_TYPE_U16, OT_SVP_BLOB_TYPE_S16, OT_SVP_BLOB_TYPE_U8, OT_SVP_BLOB_TYPE_S8之一。
id_matrix数据类型必须为OT_SVP_BLOB_TYPE_U32。
【相关数据类型及接口】
ot_svp_mau_sort_ctrl¶
【说明】
定义排序控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
ot_svp_mau_sort_mode mode;
td_bool has_idx;
td_bool has_id_matrix;
td_bool is_instant;
ot_svp_mem_info tmp_buf;
} ot_svp_mau_sort_ctrl;
【成员】
【注意事项】
has_idx 和has_id_matrix不能同时为TD_TRUE。
辅助内存大小必须大于或等于由ss_mpi_svp_mau_get_sort_tmpbuf_size计算大小。
【相关数据类型及接口】
ot_svp_mau_sort_result¶
【说明】
定义排序结果。
【定义】
typedef struct {
ot_svp_blob top_n;
ot_svp_blob top_n_idx;
} ot_svp_mau_sort_result;
【成员】
【注意事项】
top_n数据类型必须与源数据类型一致。
top_n_idx数据类型必须为OT_SVP_BLOB_TYPE_U32。
【相关数据类型及接口】
ot_svp_mau_fir_src¶
【说明】
定义矩阵距离结果。
【定义】
typedef struct {
ot_svp_blob query_item;
ot_svp_blob bucket_center;
ot_svp_blob dict_info;
ot_svp_blob bucket_info;
} ot_svp_mau_fir_src;
【成员】
【注意事项】
query_item, bucket_center 和dict_info的width必须为一致。
bucket_center 和bucket_info 的height必须一致。
bucket_info的width必须为4。
【相关数据类型及接口】
ot_svp_mau_fir_result¶
【说明】
定义快速图像检索结果。
【定义】
typedef ot_svp_mau_sort_result ot_svp_mau_fir_result;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
ot_svp_mau_fir_ctrl¶
【说明】
定义快速图像检索控制信息。
【定义】
typedef struct {
ot_svp_mau_id mau_id;
td_bool is_instant;
td_u16 sub_vec_num;
td_u16 bucket_num;
ot_svp_mem_info feature_db;
ot_svp_mem_info id_db;
ot_svp_mem_info tmp_buf;
} ot_svp_mau_fir_ctrl;
【成员】
【注意事项】
无。
【相关数据类型及接口】
错误码¶
MAU模块API错误码如下所示。
表 1 MAU模块API错误码
Proc调试信息¶
概述¶
调试信息采用了Linux下的proc文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用。
【文件目录】
/proc/umap
【信息查看方法】
在控制台上可以使用cat命令查看信息,cat /proc/umap/mau;也可以使用其他常用的文件操作命令,例如 cp /proc/umap/mau ./,将文件拷贝到当前目录。
在应用程序中可以将上述文件当作普通只读文件进行读操作,例如fopen、fread等。
取值为{0, 1}的参数,如未列出具体取值和含义的对应关系,则参数为1时表示肯定,为0时表示否定。
取值为{aaa, bbb, ccc}的参数,未列出具体取值和含义的对应关系,但可直接根据取值aaa、bbb或ccc判断参数含义
Proc信息说明¶
【调试信息】
# cat /proc/umap/mau
[MAU] Version: [Vx.x.x.x B0xx Release], Build Time[mm dd yyyy, hh:mm:ss]
------------------mau module param------------------------------------
mau_save_power mau_max_mem_info_num mau_max_node_num
1 32 512
---------------------------mau queue info--------------------------------
core_id wait busy wait_cur_id wait_end_id busy_cur_id
0 0 -1 0 0 0
busy_end_id
0
---------------------------mau task info---------------------------------
core_id handle task_finish last_id task_id handle_wrap
0 0 0 0 0 0
finish_wrap free_mem_info_num busy_mem_info_num
0 32 0
---------------------------mau runtime info-----------------------------
core_id last_instant irq_cnt_per_sec max_irq_cnt_per_sec
0 0 0 0
total_irq_cnt_last_sec total_irq_cnt query_timeout_cnt
0 0 0
sys_timeout_cnt cfg_err_cnt bus_err_cnt cur_irq_time
0 0 0 0
max_irq_time irq_time_last_sec max_irq_time_per_sec total_irq_time
0 24 0 0
last_task_hw_time run_time
0_ 8
--------------------------mau invoke info------------------------------
core_id matrix_mul cos_dist euclid_dist
0 0 0 0
manhattan_dist transpose vector_op type_convert sort fir
0 0 0 0 0 0
【调试信息分析】
记录当前MAU工作状态资源信息,主要包括MAU队列状态信息,任务状态信息,运行时状态信息和调用信息。
【参数说明】
DPU_RECT¶
概述¶
DPU(Depth Process Unit)为_识别_分析系统中的深度处理单元。用户基于DPU对输入的左图像和右图像经过校正和匹配计算得出深度图。DPU分为校正(DPU_RECT)和匹配(DPU_MATCH)两个模块,同时使用,也可单独使用。DPU_RECT对输入的左图像和右图像进行校正。
功能描述¶
重要概念¶
组(GROUP)
DPU_RECT对用户提供组(GROUP)的概念。最大可用数为 16 个,各组分时复用 DPU_RECT硬件。
通道(CHANNEL )
DPU_RECT组的通道。每组包含两个通道,分为左右两通道。
管道(PIPE)
DPU_RECT组的管道。每组包含两个管道,分为左右两管道。
ot_dpu_rect_mem_info内存排布

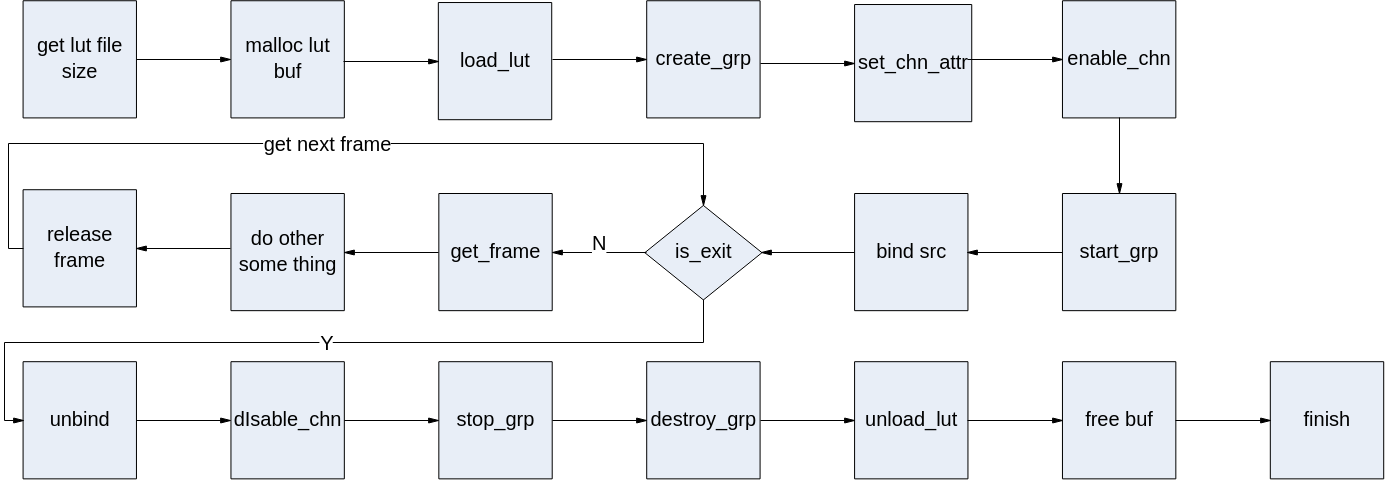
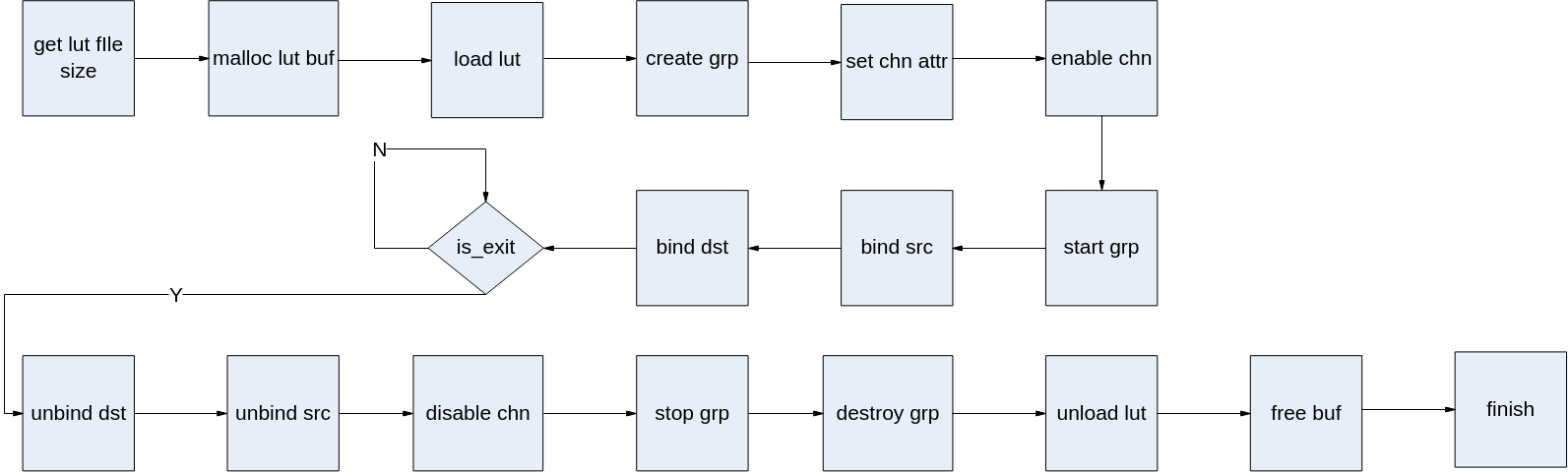
调用流程¶
典型场景调用流程按是否绑定目标场景分为如图1和图2两种。绑定场景:支持VI或者VPSS作为DPU_RECT源,DPU_MATCH作为DPU_RECT的目标。
注意:DPU RECT绑定前端模块接收视频帧时,内部会做同步处理,不满足同步要求的帧会被丢弃。
API参考¶
该功能模块为用户提供以下MPI:
ss_mpi_dpu_rect_load_lut:加载查找表。
ss_mpi_dpu_rect_unload_lut:卸载查找表。
ss_mpi_dpu_rect_set_grp_attr:设置组属性。
ss_mpi_dpu_rect_get_grp_attr:获取组属性。
ss_mpi_dpu_rect_set_chn_attr:设置通道属性。
ss_mpi_dpu_rect_get_chn_attr:获取通道属性。
ss_mpi_dpu_rect_send_frame:用户发送数据。
ss_mpi_dpu_rect_get_frame:用户从通道获取一帧处理完成的图像。
ss_mpi_dpu_rect_release_frame:用户释放一帧通道图像。
ss_mpi_dpu_rect_load_lut¶
【描述】
加载查找表。
【语法】
td_s32 ss_mpi_dpu_rect_load_lut(const ot_dpu_rect_mem_info *lut_mem, ot_dpu_rect_lut_id *rect_lut_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
lut_mem -> phys_addr / lut_mem -> virt_addr必须是申请好的内存,lut_mem -> size值为查找表文件大小。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_unload_lut¶
【描述】
卸载查找表。
【语法】
td_s32 ss_mpi_dpu_rect_unload_lut(ot_dpu_rect_lut_id rect_lut_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
rect_lut_id 由ss_mpi_dpu_rect_load_lut 获取到。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_create_grp¶
【描述】
创建组。
【语法】
td_s32 ss_mpi_dpu_rect_create_grp(ot_dpu_rect_grp rect_grp, const ot_dpu_rect_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
不支持重复创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_destroy_grp¶
【描述】
销毁组。
【语法】
td_s32 ss_mpi_dpu_rect_destroy_grp(ot_dpu_rect_grp rect_grp);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
调用此接口之前,如果已经成功执行ss_mpi_dpu_rect_start_grp,必须先调用ss_mpi_dpu_rect_stop_grp禁用此组。
调用此接口时,会一直等待此组当前任务处理结束才会真正销毁。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_set_grp_attr¶
【描述】
设置组属性。
【语法】
td_s32 ss_mpi_dpu_rect_set_grp_attr(ot_dpu_rect_grp rect_grp, const ot_dpu_rect_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
组属性必须合法,其中部分静态属性不可动态设置,具体请参见ot_dpu_rect_grp_attr。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_get_grp_attr¶
【描述】
获取组属性。
【语法】
td_s32 ss_mpi_dpu_rect_get_grp_attr(ot_dpu_rect_grp rect_grp, ot_dpu_rect_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_start_grp¶
【描述】
启用组。
【语法】
td_s32 ss_mpi_dpu_rect_start_grp(ot_dpu_rect_grp rect_grp);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
组的通道必须先使能。
重复调用该函数设置同一个组返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_stop_grp¶
【描述】
禁用组。
【语法】
td_s32 ss_mpi_dpu_rect_stop_grp(ot_dpu_rect_grp rect_grp);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
重复禁用同一组返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_set_chn_attr¶
【描述】
设置通道属性。
【语法】
td_s32 ss_mpi_dpu_rect_set_chn_attr(ot_dpu_rect_grp rect_grp, ot_dpu_rect_chn rect_chn, const ot_dpu_rect_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
|
取值范围:[0, OT_DPU_RECT_MAX_CHN_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_get_chn_attr¶
【描述】
获取通道属性。
【语法】
td_s32 ss_mpi_dpu_rect_get_chn_attr(ot_dpu_rect_grp rect_grp, ot_dpu_rect_chn rect_chn, ot_dpu_rect_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
|
取值范围:[0, OT_DPU_RECT_MAX_CHN_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_enable_chn¶
【描述】
启用通道。
【语法】
td_s32 ss_mpi_dpu_rect_enable_chn(ot_dpu_rect_grp rect_grp, ot_dpu_rect_chn rect_chn);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
|
取值范围:[0, OT_DPU_RECT_MAX_CHN_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
通道属性必须先设置。
重复使能返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_disable_chn¶
【描述】
禁用通道。
【语法】
td_s32 ss_mpi_dpu_rect_disable_chn(ot_dpu_rect_grp rect_grp, ot_dpu_rect_chn rect_chn);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
|
取值范围:[0, OT_DPU_RECT_MAX_CHN_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
重复禁用返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_send_frame¶
【描述】
用户发送数据。
【语法】
td_s32 ss_mpi_dpu_rect_send_frame(ot_dpu_rect_grp rect_grp, const ot_video_frame_info *left_frame, const ot_video_frame_info *right_frame, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
超时参数 milli_sec 设为-1 时,为阻塞接口;0 时为非阻塞接口;大于 0 时为超时等待时间,超时时间的单位为毫秒(ms)。 |
||
图像像素格式:OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
||
|
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
用户使用此接口时,可以自行进行帧率控制。
left_frame / right_frame 图像地址必须是VB申请的,宽高要求2对齐,stride要求16字节对齐。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_get_frame¶
【描述】
用户从通道获取一帧处理完成的图像。
【语法】
td_s32 ss_mpi_dpu_rect_get_frame(ot_dpu_rect_grp rect_grp, td_s32 milli_sec, ot_dpu_rect_frame_info *rect_frame_info);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
超时参数 milli_sec 设为-1 时,为阻塞接口;0 时为非阻塞接口;大于 0 时为超时等待时间,超时时间的单位为毫秒(ms)。 |
原始图像支持:OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
|||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
只有设置组属性的队列深度不为0,才能获取到图像。
若是用户发送数据模式,原始图像数据信息由用户保证,若是绑定模式,由系统保证。
校正之后的图像数据信息由系统保证。
【举例】
无。
【相关主题】
ss_mpi_dpu_rect_release_frame¶
【描述】
用户释放帧通道图像。
【语法】
td_s32 ss_mpi_dpu_rect_release_frame(ot_dpu_rect_grp rect_grp, const ot_dpu_rect_frame_info *rect_frame_info);
【参数】
|
取值范围:[0, OT_DPU_RECT_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_rect.h、ss_mpi_dpu_rect.h
库文件:libss_dpu_rect.a
【注意】
组必须已创建。
rect_frame_info由ss_mpi_dpu_rect_get_frame获取,与其配对使用。
【举例】
无。
【相关主题】
数据类型和数据结构¶
DPU_RECT相关数据类型、数据结构定义如下:
ot_dpu_rect_lut_id:定义查找表ID。
ot_dpu_rect_grp:定义组号。
ot_dpu_rect_pipe:定义管道号。
ot_dpu_rect_chn:定义通道号。
ot_dpu_rect_mode:定义校正模式。
ot_dpu_rect_grp_attr:定义组属性。
ot_dpu_rect_chn_attr:定义通道属性。
ot_dpu_rect_mem_info:定义一维内存信息。
ot_dpu_rect_frame_info:定义校正图像帧信息。
OT_DPU_RECT_MAX_GRP_NUM:定义最大组数。
OT_DPU_RECT_MAX_PIPE_NUM:定义最大管道数。
OT_DPU_RECT_MAX_CHN_NUM:定义最大通道数。
OT_DPU_RECT_IN_IMAGE_MAX_WIDTH:定义最大输入图像的宽度。
OT_DPU_RECT_IN_IMAGE_MAX_HEIGHT:定义最大输入图像的高度。
OT_DPU_RECT_IN_IMAGE_MIN_WIDTH:定义最小输入图像的宽度。
OT_DPU_RECT_IN_IMAGE_MIN_HEIGHT:定义最小输入图像的高度。
OT_DPU_RECT_OUT_IMAGE_MAX_WIDTH:定义最大输出图像的宽度。
OT_DPU_RECT_OUT_IMAGE_MAX_HEIGHT:定义最大输出图像的高度。
OT_DPU_RECT_OUT_IMAGE_MIN_WIDTH:定义最小输出图像的宽度。
OT_DPU_RECT_OUT_IMAGE_MIN_HEIGHT:定义最小输出图像的高度。
ot_dpu_rect_lut_id¶
【说明】
定义查找表ID。
【定义】
typedef td_s32 ot_dpu_rect_lut_id;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_grp¶
【说明】
定义组号。
【定义】
typedef td_s32 ot_dpu_rect_grp;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_pipe¶
【说明】
定义管道号。
【定义】
typedef td_s32 ot_dpu_rect_pipe;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_chn¶
【说明】
定义通道号。
【定义】
typedef td_s32 ot_dpu_rect_chn;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_mode¶
【说明】
定义校正模式。
【定义】
typedef enum {
OT_DPU_RECT_MODE_SINGLE = 0x0, /* only channel 0 work */
OT_DPU_RECT_MODE_DOUBLE = 0x1, /* two channel work */
OT_DPU_RECT_MODE_BUTT
} ot_dpu_rect_mode;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_grp_attr¶
【说明】
定义组属性。
【定义】
typedef struct {
ot_dpu_rect_mode rect_mode; /* rectification mode, it can not be changed dynamic */
ot_size left_image_size; /* left image size. */
ot_size right_image_size; /* right image size. */
ot_dpu_rect_lut_id left_lut_id; /* left image rectification lut */
ot_dpu_rect_lut_id right_lut_id; /* right image rectification lut */
td_u32 depth; /* the depth of user image queue for getting rectification output image,
* it can not be changed dynamic. range:[0,8]
*/
td_bool is_need_src_frame; /* the flag of getting source videoframe. */
ot_frame_rate_ctrl frame_rate; /* grp frame rate contrl. */
} ot_dpu_rect_grp_attr;
【成员】
|
【注意事项】
分辨率宽、高要求偶数对齐。
【相关数据类型及接口】
无。
ot_dpu_rect_chn_attr¶
【说明】
定义通道属性。
【定义】
typedef struct {
ot_size image_size; /* rectification output image size */
} ot_dpu_rect_chn_attr;
【成员】
【注意事项】
分辨率宽、高要求偶数对齐。
目标分辨率与查找表分辨率一致。
目标分辨率必须小于等于输入图像分辨率。
【相关数据类型及接口】
无。
ot_dpu_rect_mem_info¶
【说明】
定义一维内存信息。
【定义】
typedef struct {
td_u64 phys_addr;
td_u64 virt_addr;
td_u32 size;
} ot_dpu_rect_mem_info;
【成员】
内存块字节数,见图1。 |
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_rect_frame_info¶
【说明】
定义校正图像帧信息。
【定义】
typedef struct {
ot_video_frame_info src_frame[OT_DPU_RECT_MAX_PIPE_NUM]; /* src_frame[0]:left frame,src_frame[1]:right frame */
ot_video_frame_info rect_frame[OT_DPU_RECT_MAX_PIPE_NUM]; /* rect_frame[0]:left frame,rect_frame[1]:right frame */
} ot_dpu_rect_frame_info;
【成员】
src_frame[OT_DPU_RECT_MAX_PIPE_NUM] |
|
rect_frame[OT_DPU_RECT_MAX_PIPE_NUM] |
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_MAX_GRP_NUM¶
【说明】
定义最大组数。
【定义】
#define OT_DPU_RECT_MAX_GRP_NUM 16
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_MAX_PIPE_NUM¶
【说明】
定义最大管道数。
【定义】
#define OT_DPU_RECT_MAX_PIPE_NUM 2
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_MAX_CHN_NUM¶
【说明】
定义最大管道数。
【定义】
#define OT_DPU_RECT_MAX_CHN_NUM 2
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_IN_IMAGE_MAX_WIDTH¶
【说明】
定义最大输入图像的宽度。
【定义】
#define OT_DPU_RECT_IN_IMAGE_MAX_WIDTH 2048
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_IN_IMAGE_MAX_HEIGHT¶
【说明】
定义最大输入图像的高度。
【定义】
#define OT_DPU_RECT_IN_IMAGE_MAX_HEIGHT 2048
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_IN_IMAGE_MIN_WIDTH¶
【说明】
定义最小输入图像的宽度。
【定义】
#define OT_DPU_RECT_IN_IMAGE_MIN_WIDTH 128
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_IN_IMAGE_MIN_HEIGHT¶
【说明】
定义最小输入图像的高度。
【定义】
#define OT_DPU_RECT_IN_IMAGE_MIN_HEIGHT 64
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_OUT_IMAGE_MAX_WIDTH¶
【说明】
定义最大输出图像的宽度。
【定义】
#define OT_DPU_RECT_OUT_IMAGE_MAX_WIDTH 1920
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_OUT_IMAGE_MAX_HEIGHT¶
【说明】
定义最大输出图像的高度。
【定义】
#define OT_DPU_RECT_OUT_IMAGE_MAX_HEIGHT 1080
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_OUT_IMAGE_MIN_WIDTH¶
【说明】
定义最小输出图像的宽度。
【定义】
#define OT_DPU_RECT_OUT_IMAGE_MIN_WIDTH 128
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_RECT_OUT_IMAGE_MIN_HEIGHT¶
【说明】
定义最小输出图像的高度。
【定义】
#define OT_DPU_RECT_OUT_IMAGE_MIN_HEIGHT 64
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
错误码¶
本模块API错误码如下所示。
表 1 DPU_RECT模块API错误码
Proc调试信息¶
概述¶
调试信息采用了Linux下的proc文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用。
【文件目录】
/proc/umap
【信息查看方法】
在控制台上可以使用cat命令查看信息,cat /proc/umap/rect;也可以使用其他常用的文件操作命令,例如 cp /proc/umap/rect ./,将文件拷贝到当前目录。
在应用程序中可以将上述文件当作普通只读文件进行读操作,例如fopen、fread等。
取值为{0, 1}的参数,如未列出具体取值和含义的对应关系,则参数为1时表示肯定,为0时表示否定。
取值为{aaa, bbb, ccc}的参数,未列出具体取值和含义的对应关系,但可直接根据取值aaa、bbb或ccc判断参数含义
Proc信息说明¶
【调试信息】
# cat /proc/umap/rect
[DPU_RECT] Version: [Vx.x.x.x B0xx Release], Build Time[mm dd yyyy, hh:mm:ss]
----------------------------------------dpu rect hardware status-------------------------------------------
is_busy timeout_cnt
n 0
----------------------------------------dpu rect grp attr1---------------------------------------------------
grp_id mode is_start grp_state is_need_src_frame depth src_frame_rate dst_frame_rate
0 double y create y 0 -1 -1
----------------------------------------dpu rect grp attr2---------------------------------------------------
left_width left_height right_width right_height
1280 720 1280 720
----------------------------------------dpu rect chn attr----------------------------------------------------
grp_id chn_id enable width height
0 0 y 1280 720
0 1 y 1280 720
----------------------------------------dpu rect lut attr-----------------------------------------------------
grp_id chn_id lut_id phys_addr width height
0 0 0 727a6010 1280 720
0 1 1 72b2b010 1280 720
----------------------------------------dpu rect pipe queue------------------------------------------------
grp_id pipe_id busy_num free_num
0 0 0 8
0 1 0 8
----------------------------------------dpu rect out queue--------------------------------------------------
grp_id busy_num free_num
0 1 0
----------------------------------------dpu rect work queue------------------------------------------------
busy_num free_num
0 128
----------------------------------------dpu rect grp status--------------------------------------------------
grp_id frame_rate start_cnt start_fail_cnt send_pic_cnt frame_lost
0 1 1 0 1 0
grp_id pipe_id in_frame_lost
0 0 0
0 1 0
----------------------------------------dpu rect run-time info1--------------------------------------------
irq_num_per_sec max_irq_num_per_sec irq_num_last_sec irq_num_cur cur_irq_cost_time max_irq_cost_time
31 31 466 481 56 67
----------------------------------------dpu rect run-time info2--------------------------------------------
irq_cost_per_sec max_irq_cost_per_sec irq_time_total proc_cost_per_frame hw_proc_cost_per_frame runtime
1780 1916 28123 3908 3889 17
【调试信息分析】
记录当前DPU_RECT属性配置以及状态信息。
【参数说明】
DPU_MATCH¶
概述¶
DPU(Depth Process Unit)为_识别_分析系统中的深度处理单元。用户基于DPU对输入的左图像和右图像经过校正和匹配计算得出深度图。DPU分为校正(DPU_RECT)和匹配(DPU_MATCH)两个模块,同时使用,也可单独使用。DPU_MATCH对输入的左图像和右图像进行匹配处理输出深度图。
功能描述¶
重要概念¶

调用流程¶
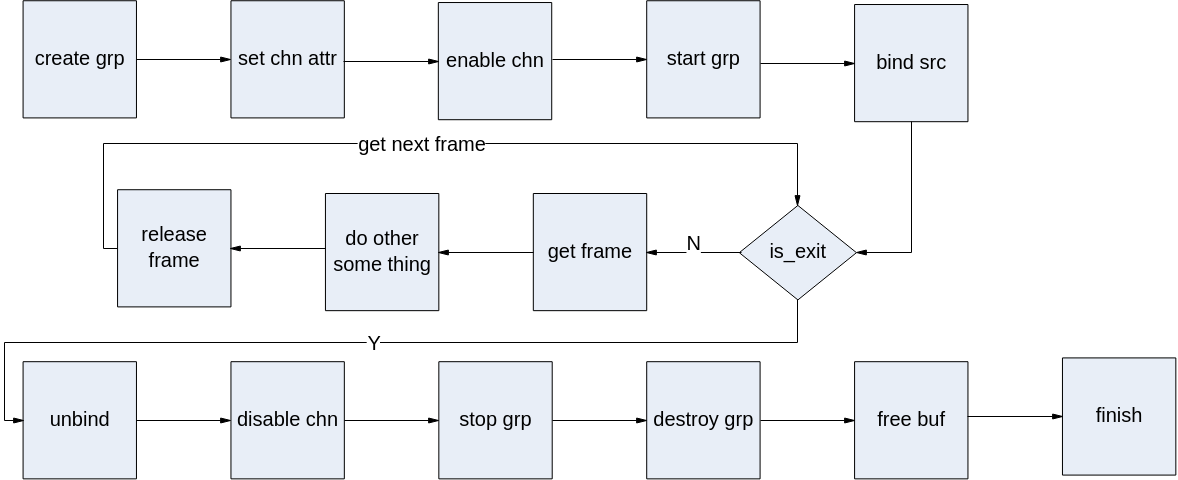
支持DPU_RECT作为DPU_MATCH的源。目前无目标模块可以绑定DPU_MATCH, 接收DPU_MATCH进行处理,必须手动的调用ss_mpi_dpu_match_get_frame获取结果,再进行处理。如图1所示。
API参考¶
该功能模块为用户提供以下MPI:
ss_mpi_dpu_match_get_assist_buf_size:获取辅助内存字节数。
ss_mpi_dpu_match_set_chn_attr:设置通道属性。
ss_mpi_dpu_match_get_chn_attr:获取通道属性。
ss_mpi_dpu_match_send_frame:用户发送数据。
ss_mpi_dpu_match_get_frame:用户从通道获取一帧处理完成的图像。
ss_mpi_dpu_match_release_frame:用户释放一帧通道图像。
ss_mpi_dpu_match_set_grp_cost_param:设置组的代价参数。
ss_mpi_dpu_match_get_grp_cost_param:获取组的代价参数。
ss_mpi_dpu_match_get_assist_buf_size¶
【描述】
获取辅助内存字节数。
【语法】
td_s32 ss_mpi_dpu_match_get_assist_buf_size(td_u16 disparity_num, td_u32 dst_height, td_u32 *size);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
无。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_create_grp¶
【描述】
创建组。
【语法】
td_s32 ss_mpi_dpu_match_create_grp(ot_dpu_match_grp match_grp, const ot_dpu_match_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
不支持重复创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_destroy_grp¶
【描述】
销毁组。
【语法】
td_s32 ss_mpi_dpu_match_destroy_grp(ot_dpu_match_grp match_grp);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
调用此接口之前,如果已经成功执行ss_mpi_dpu_match_start_grp,必须先调用ss_mpi_dpu_match_stop_grp禁用此组。
调用此接口时,会一直等待此组当前任务处理结束才会真正销毁。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_set_grp_attr¶
【描述】
设置组属性。
【语法】
td_s32 ss_mpi_dpu_match_set_grp_attr(ot_dpu_match_grp match_grp, const ot_dpu_match_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
组属性必须合法,其中部分静态属性不可动态设置,具体请参见ot_dpu_match_grp_attr。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_get_grp_attr¶
【描述】
获取组属性。
【语法】
td_s32 ss_mpi_dpu_match_get_grp_attr(ot_dpu_match_grp match_grp, ot_dpu_match_grp_attr *grp_attr);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_start_grp¶
【描述】
启用组。
【语法】
td_s32 ss_mpi_dpu_match_start_grp(ot_dpu_match_grp match_grp);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
组的通道必须先使能。
重复调用该函数设置同一个组返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_stop_grp¶
【描述】
禁用组。
【语法】
td_s32 ss_mpi_dpu_match_stop_grp(ot_dpu_match_grp match_grp);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
重复禁用同一组返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_set_chn_attr¶
【描述】
设置通道属性。
【语法】
td_s32 ss_mpi_dpu_match_set_chn_attr(ot_dpu_match_grp match_grp, ot_dpu_match_chn match_chn, const ot_dpu_match_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_get_chn_attr¶
【描述】
获取通道属性。
【语法】
td_s32 ss_mpi_dpu_match_get_chn_attr(ot_dpu_match_grp match_grp, ot_dpu_match_chn match_chn, ot_dpu_match_chn_attr *chn_attr);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_enable_chn¶
【描述】
启用通道。
【语法】
td_s32 ss_mpi_dpu_match_enable_chn(ot_dpu_match_grp match_grp, ot_dpu_match_chn match_chn);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
通道属性必须先设置。
重复使能返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_disable_chn¶
【描述】
禁用通道。
【语法】
td_s32 ss_mpi_dpu_match_disable_chn(ot_dpu_match_grp match_grp, ot_dpu_match_chn match_chn);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
重复禁用返回成功。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_send_frame¶
【描述】
用户发送数据。
【语法】
td_s32 ss_mpi_dpu_match_send_frame(ot_dpu_match_grp match_grp, const ot_dpu_match_frame_info *src_frame_info, td_s32 milli_sec);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
超时参数 milli_sec 设为-1 时,为阻塞接口;0 时为非阻塞接口;大于 0 时为超时等待时间,超时时间的单位为毫秒(ms)。 |
|
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
|||
校正图像支持:OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
用户使用此接口时,可以自行进行帧率控制。
src_frame_info 里面的src_frame, rect_frame图像地址必须是VB申请的,宽高要求2对齐,stride要求16字节对齐。
匹配模块对于src_frame_info 里面的src_frame只是用于保证ss_mpi_dpu_match_get_frame获取到的原始图像,校正图像和匹配图像是一致的,不会对src_frame做任何处理,因此只检查VB合法性,不检查图像参数。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_get_frame¶
【描述】
用户从通道获取处理完成的图像。
【语法】
td_s32 ss_mpi_dpu_match_get_frame(ot_dpu_match_grp match_grp, td_s32 milli_sec, ot_dpu_match_frame_info *src_frame_info, ot_video_frame_info *dst_frame);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
超时参数 milli_sec 设为-1 时,为阻塞接口;0 时为非阻塞接口;大于 0 时为超时等待时间,超时时间的单位为毫秒(ms)。 |
||
|
OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
|||
校正图像支持:OT_PIXEL_FORMAT_YVU_SEMIPLANAR_420/OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422/OT_PIXEL_FORMAT_YUV_400 |
|||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
当组属性的队列深度不为0时,才能获取到图像。
当组属性的is_need_src_frame为TD_TRUE时,src_frame_info的src_frame才能获取到。
输出视差图以右图为基准图像。
输出结果数据元素格式为S10Q6(1bit符号位+9bit整数部分+6bit小数部分)。
输出图像分辨率与输入右图相同。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_release_frame¶
【描述】
用户释放通道图像。
【语法】
td_s32 ss_mpi_dpu_match_release_frame(ot_dpu_match_grp match_grp, const ot_dpu_match_frame_info *src_frame_info, const ot_video_frame_info *dst_frame);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
src_frame_info/ dst_frame由ss_mpi_dpu_match_get_frame获取,与其配对使用。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_set_grp_cost_param¶
【描述】
设置组的代价参数。
【语法】
td_s32 ss_mpi_dpu_match_set_grp_cost_param(ot_dpu_match_grp match_grp, const ot_dpu_match_cost_param *cost_param);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_get_grp_cost_param¶
【描述】
获取组的代价参数。
【语法】
td_s32 ss_mpi_dpu_match_get_grp_cost_param(ot_dpu_match_grp match_grp, ot_dpu_match_cost_param *cost_param);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_set_grp_param¶
【描述】
设置组参数。
【语法】
td_s32 ss_mpi_dpu_match_set_grp_param(ot_dpu_match_grp match_grp, const ot_dpu_match_param *param);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
【举例】
无。
【相关主题】
ss_mpi_dpu_match_get_grp_param¶
【描述】
获取组参数。
【语法】
td_s32 ss_mpi_dpu_match_get_grp_param(ot_dpu_match_grp match_grp, ot_dpu_match_param *param);
【参数】
|
取值范围:[0, OT_DPU_MATCH_MAX_GRP_NUM)。 |
||
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_dpu_match.h、ss_mpi_dpu_match.h
库文件:libss_dpu_match.a
【注意】
组必须已创建。
此接口兼容ss_mpi_dpu_match_get_grp_cost_param。
必须设置param->version才能获取对应版本的参数,否则获取失败。
【举例】
无。
【相关主题】
数据类型和数据结构¶
DPU_MATCH相关数据类型、数据结构定义如下:
ot_dpu_match_grp:定义组号。
ot_dpu_match_pipe:定义管道号。
ot_dpu_match_chn:定义通道号。
ot_dpu_match_mask_mode:定义聚合模板模式。
ot_dpu_match_density_accuracy_mode:定义稠密精度模式。
ot_dpu_match_speed_accuracy_mode:定义速度精度模式。
ot_dpu_match_disparity_subpixel:定义是否计算亚像素枚举值。
ot_dpu_match_grp_attr:定义组属性。
ot_dpu_match_chn_attr:定义通道属性。
ot_dpu_match_frame_info:定义匹配图像帧信息。
ot_dpu_match_mem_info:定义一维内存信息。
ot_dpu_match_cost_param:定义代价参数。
ot_dpu_match_version: 定义参数版本。
ot_dpu_match_param_v1: 定义版本1参数。
ot_dpu_match_param_v2: 定义版本2参数。
ot_dpu_match_param: 定义匹配参数。
OT_DPU_MATCH_MAX_GRP_NUM:定义最大组数。
OT_DPU_MATCH_MAX_PIPE_NUM:定义最大管道数。
OT_DPU_MATCH_MAX_CHN_NUM:定义最大通道数。
OT_DPU_MATCH_IN_IMAGE_MAX_WIDTH:定义最大输入图像的宽度。
OT_DPU_MATCH_IN_IMAGE_MAX_HEIGHT:定义最大输入图像的高度。
OT_DPU_MATCH_IN_IMAGE_MIN_WIDTH:定义最小输入图像的宽度。
OT_DPU_MATCH_IN_IMAGE_MIN_HEIGHT:定义最小输入图像的高度。
OT_DPU_MATCH_OUT_IMAGE_MAX_WIDTH:定义最大输出图像的宽度。
OT_DPU_MATCH_OUT_IMAGE_MAX_HEIGHT:定义最大输出图像的高度。
OT_DPU_MATCH_OUT_IMAGE_MIN_WIDTH:定义最小输出图像的宽度。
OT_DPU_MATCH_OUT_IMAGE_MIN_HEIGHT:定义最小输出图像的高度。
ot_dpu_match_grp¶
【说明】
定义组号。
【定义】
typedef td_s32 ot_dpu_match_grp;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_pipe¶
【说明】
定义管道号。
【定义】
typedef td_s32 ot_dpu_match_pipe;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_chn¶
【说明】
定义通道号。
【定义】
typedef td_s32 ot_dpu_match_chn;
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_mask_mode¶
【说明】
定义聚合模板模式。
【定义】
typedef enum {
OT_DPU_MATCH_MASK_DEFAULT_MODE = 0x0,
OT_DPU_MATCH_MASK_1X1_MODE = 0x1,
OT_DPU_MATCH_MASK_3X3_MODE = 0x2,
OT_DPU_MATCH_MASK_5X5_MODE = 0x3,
OT_DPU_MATCH_MASK_7X7_MODE = 0x4,
OT_DPU_MATCH_MASK_9X9_MODE = 0x5,
OT_DPU_MATCH_MASK_MODE_BUTT
} ot_dpu_match_mask_mode;
【成员】
【注意事项】
模板大小影响每一像素匹配时的关联区域大小,建议优先选择默认模板或9x9模板。
【相关数据类型及接口】
无。
ot_dpu_match_density_accuracy_mode¶
【说明】
定义稠密精度模式。
【定义】
typedef enum {
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D0_A9 = 0x0,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D1_A8 = 0x1,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D2_A7 = 0x2,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D3_A6 = 0x3,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D4_A5 = 0x4,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D5_A4 = 0x5,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D6_A3 = 0x6,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D7_A2 = 0x7,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D8_A1 = 0x8,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D9_A0 = 0x9,
OT_DPU_MATCH_DENSITY_ACCURACY_MODE_BUTT
} ot_dpu_match_density_accuracy_mode;
【成员】
【注意事项】
稠密度:DPU输出包含无效点的稀疏视差图,无效点越多稠密度越低。
例:OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D0_A9表示稠密度最低,精度最高。建议采用OT_DPU_MATCH_DENSITY_ACCURACY_MODE_D9_A0。
不同场景下各模式表现会有所不同,可能出现相邻模式效果相似或颠倒的情况。
【相关数据类型及接口】
无。
ot_dpu_match_speed_accuracy_mode¶
【说明】
定义速度精度模式。
【定义】
typedef enum {
OT_DPU_MATCH_SPEED_ACCURACY_MODE_SPEED = 0x0,
OT_DPU_MATCH_SPEED_ACCURACY_MODE_ACCURACY = 0x1,
OT_DPU_MATCH_SPEED_ACCURACY_MODE_BUTT
} ot_dpu_match_speed_accuracy_mode;
【成员】
【注意事项】
速度模式下,DPU处理速度提升约一倍,精度有所下降。
【相关数据类型及接口】
无。
ot_dpu_match_disparity_subpixel¶
【说明】
定义是否计算亚像素枚举值。
【定义】
typedef enum {
OT_DPU_MATCH_DISPARITY_SUBPIXEL_DISABLE = 0x0,
OT_DPU_MATCH_DISPARITY_SUBPIXEL_ENABLE = 0x1,
OT_DPU_MATCH_DISPARITY_SUBPIXEL_BUTT
} ot_dpu_match_disparity_subpixel;
【成员】
【注意事项】
计算亚像素时,输出视差包含6bit小数位,不计算时,输出视差仅包含整数位。
【相关数据类型及接口】
无。
ot_dpu_match_grp_attr¶
【说明】
定义组属性。
【定义】
typedef struct {
ot_size left_image_size; /* left image size. */
ot_size right_image_size; /* right image size. */
ot_dpu_match_mask_mode match_mask_mode; /* aggregation mask mode. */
ot_dpu_match_density_accuracy_mode density_accuracy_mode; /* adjust density-accuracy trade-off. */
ot_dpu_match_speed_accuracy_mode speed_accuracy_mode; /* adjust speed-accuracy trade-off. */
ot_dpu_match_disparity_subpixel disparity_subpixel_en; /* calculate subpixel disparity or not. */
td_u16 disparity_num; /* the number of disparity, it must be the multiple of 16. range:[16,224] */
td_u16 disparity_start_pos; /* minimum disparity, it must be the multiple of 2. range:[0,126] */
td_u32 depth; /* the depth of user image queue for getting match output image,
it can not be changed dynamic. range:[0,8] */
td_bool is_need_src_frame; /* the flag of getting source videoframe.it will effect when bind dpu rect. */
ot_dpu_match_mem_info assist_buf; /* assistance buffer. */
ot_frame_rate_ctrl frame_rate; /* grp frame rate contrl. */
} ot_dpu_match_grp_attr;
【成员】
|
【注意事项】
右图宽度需大于等于视差起始位置+视差数组(即组属性disparity_start_pos 和disparity_num)。
左图宽度需大于等于右图宽度。
左图右图高度相等。
分辨率宽、高要求偶数对齐。
disparity_start_pos必须为偶数。
【相关数据类型及接口】
无。
ot_dpu_match_chn_attr¶
【说明】
定义通道属性。
【定义】
typedef struct {
ot_size image_size; /* output image size. */
} ot_dpu_match_chn_attr;
【成员】
【注意事项】
分辨率宽、高要求偶数对齐。
【相关数据类型及接口】
无。
ot_dpu_match_frame_info¶
【说明】
定义匹配图像帧信息。
【定义】
typedef struct {
ot_video_frame_info src_frame[OT_DPU_MATCH_MAX_PIPE_NUM]; /* src_frame[0]:left frame,src_frame[1]:right frame */
ot_video_frame_info rect_frame[OT_DPU_MATCH_MAX_PIPE_NUM]; /* rect_frame[0]:left frame,rect_frame[1]:right frame */
} ot_dpu_match_frame_info;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_mem_info¶
【说明】
定义一维内存信息。
【定义】
typedef struct {
td_u64 phys_addr;
td_u64 virt_addr;
td_u32 size;
} ot_dpu_match_mem_info;
【成员】
内存块字节数,见图1。 |
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_cost_param¶
【说明】
定义代价参数。
【定义】
typedef struct {
td_u16 first_penalty_coef; /* First penalty coefficient. Range: [0, 138] */
td_u16 second_penalty_coef; /* First penalty coefficient. Range: [0, 138]*/
} ot_dpu_match_cost_param;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_version¶
【说明】
定义参数版本。
【定义】
typedef enum {
OT_DPU_MATCH_VERSION_V1 = 0,
OT_DPU_MATCH_VERSION_V2 = 1,
OT_DPU_MATCH_VERSION_BUTT
} ot_dpu_match_version;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_param_v1¶
【说明】
定义版本1参数。
【定义】
typedef ot_dpu_match_cost_param ot_dpu_match_param_v1;
【成员】
无。
【注意事项】
版本1参数为代价参数,与ot_dpu_match_cost_param等同。
【相关数据类型及接口】
无。
ot_dpu_match_param_v2¶
【说明】
定义版本2参数。
【定义】
typedef struct {
td_u16 first_penalty_coef; /* first penalty coefficient. Range: [0, 138] */
td_u16 second_penalty_coef; /* second penalty coefficient. Range: [0, 138] */
td_u8 aggregate_coef; /* aggregate coefficient. Range: [0, 8] */
td_u8 unique_ratio; /* uniqueness ratio. Range: [0, 31] */
td_u8 fg_init_cost_zero_thr; /* the foreground overexposure area filter threshold,[1, 16] */
td_u8 rsv;
} ot_dpu_match_param_v2;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_dpu_match_param¶
【说明】
定义匹配参数。
【定义】
typedef struct {
ot_dpu_match_version version;
union {
ot_dpu_match_param_v1 v1;
ot_dpu_match_param_v2 v2;
};
} ot_dpu_match_param;
【成员】
【注意事项】
version不同值取不同的联合体变量。如OT_DPU_MATCH_VERSION_V1时,v1有效。
高版本兼容低版本,如v2兼容v1版本。
如某些参数想使用默认参数,可以通过先调用 ss_mpi_dpu_match_get_grp_param获取到默认值,更改完参数,再调用ss_mpi_dpu_match_set_grp_param设置参数。
【相关数据类型及接口】
无。
OT_DPU_MATCH_MAX_GRP_NUM¶
【说明】
定义最大组数。
【定义】
#define OT_DPU_MATCH_MAX_GRP_NUM 16
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_MAX_PIPE_NUM¶
【说明】
定义最大管道数。
【定义】
#define OT_DPU_MATCH_MAX_PIPE_NUM 2
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_MAX_CHN_NUM¶
【说明】
定义最大管道数。
【定义】
#define OT_DPU_MATCH_MAX_CHN_NUM 1
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_IN_IMAGE_MAX_WIDTH¶
【说明】
定义最大输入图像的宽度。
【定义】
#define OT_DPU_MATCH_IN_IMAGE_MAX_WIDTH 1920
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_IN_IMAGE_MAX_HEIGHT¶
【说明】
定义最大输入图像的高度。
【定义】
#define OT_DPU_MATCH_IN_IMAGE_MAX_HEIGHT 1080
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_IN_IMAGE_MIN_WIDTH¶
【说明】
定义最小输入图像的宽度。
【定义】
#define OT_DPU_MATCH_IN_IMAGE_MIN_WIDTH 128
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_IN_IMAGE_MIN_HEIGHT¶
【说明】
定义最小输入图像的高度。
【定义】
#define OT_DPU_MATCH_IN_IMAGE_MIN_HEIGHT 64
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_OUT_IMAGE_MAX_WIDTH¶
【说明】
定义最大输出图像的宽度。
【定义】
#define OT_DPU_MATCH_OUT_IMAGE_MAX_WIDTH 1920
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_OUT_IMAGE_MAX_HEIGHT¶
【说明】
定义最大输出图像的高度。
【定义】
#define OT_DPU_MATCH_OUT_IMAGE_MAX_HEIGHT 1080
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_OUT_IMAGE_MIN_WIDTH¶
【说明】
定义最小输出图像的宽度。
【定义】
#define OT_DPU_MATCH_OUT_IMAGE_MIN_WIDTH 128
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
OT_DPU_MATCH_OUT_IMAGE_MIN_HEIGHT¶
【说明】
定义最小输出图像的高度。
【定义】
#define OT_DPU_MATCH_OUT_IMAGE_MIN_HEIGHT 64
【成员】
无。
【注意事项】
无。
【相关数据类型及接口】
无。
错误码¶
本模块API错误码如下所示。
表 1 DPU_MATCH模块API错误码
Proc调试信息¶
概述¶
调试信息采用了Linux下的proc文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用。
【文件目录】
/proc/umap
【信息查看方法】
在控制台上可以使用cat命令查看信息,cat /proc/umap/match;也可以使用其他常用的文件操作命令,例如 cp /proc/umap/match ./,将文件拷贝到当前目录。
在应用程序中可以将上述文件当作普通只读文件进行读操作,例如fopen、fread等。
取值为{0, 1}的参数,如未列出具体取值和含义的对应关系,则参数为1时表示肯定,为0时表示否定。
取值为{aaa, bbb, ccc}的参数,未列出具体取值和含义的对应关系,但可直接根据取值aaa、bbb或ccc判断参数含义。
Proc信息说明¶
【调试信息】
# cat /proc/umap/match
[DPU_MATCH] Version: [Vx.x.x.x B0xx Release], Build Time[mm dd yyyy, hh:mm:ss]
----------------------------------------dpu match hardware status----------------------------------------
is_busy sys_timeout_cnt
n 0
----------------------------------------dpu match grp attr1------------------------------------------------
grp_id is_start grp_state is_need_src_frame depth src_frame_rate dst_frame_rate left_width left_height
0 y create y 1 -1 -1 1050 560
----------------------------------------dpu match grp attr2------------------------------------------------
right_width right_height match_mask_mode density_accuracy_mode speed_accuracy_mode disparity_subpixel_en
1050 560 9X9 d9_a0 accuracy 1
----------------------------------------dpu match grp attr3------------------------------------------------
disparity_num disparity_start_pos first_penalty_coef second_penalty_coef assist_buf_addr assist_buf_size
80 0 8 138 882a2000 372928
----------------------------------------dpu match chn attr-------------------------------------------------
grp_id chn_id enable width height
0 0 y 1280 720
----------------------------------------dpu match pipe queue----------------------------------------------
grp_id busy_num free_num
0 0 8
----------------------------------------dpu match out queue-----------------------------------------------
grp_id busy_num free_num
0 1 0
----------------------------------------dpu match work queue---------------------------------------------
busy_num free_num
0 128
----------------------------------------dpu match grp status-----------------------------------------------
grp_id frame_rate start_cnt start_fail_cnt out_frame_lost in_frame_lost
0 1 1 0 0 0
----------------------------------------dpu match run-time info1------------------------------------------
irq_cnt_per_sec max_irq_cnt_per_sec irq_cnt_last_sec irq_cnt_cur cur_irq_cost_time max_irq_cost_time
0 0 0 694 35 35
----------------------------------------dpu match run-time info2------------------------------------------
irq_cost_per_sec max_irq_cost_per_sec irq_time_total proc_cost_per_frame hw_proc_cost_per_frame runtime
0 0 16340 23137 23108 24
【调试信息分析】
记录当前DPU_MATCH属性配置以及状态信息。
【参数说明】
DSP¶
概述¶
DSP(Digital Signal Process)是SVP 平台下的可编程硬件加速模块。用户基于DSP开发_识别_分析方案可以加速_识别_分析,降低CPU占用。
须知: 本章节对于生态开源版本SS928V100/SS927V100暂不支持。
功能描述¶
重要概念¶
句柄(handle)
用户在调用DSP处理任务时,系统会为每个任务分配一个handle,用于标识不同的任务。
查询(query)
用户根据系统返回的handle,调用ss_mpi_svp_dsp_query可以查询对应算子任务是否完成。
模块参数¶
dsp_max_node_num
DSP模块各个优先级队列节点最大数目。用户可以依据实际使用场景配置合理的最大节点数,以减少队列节点对系统内存的占用。取值范围:[20, 51]。默认值为30。
使用方法:
Linux系统通过加载xxxx_dsp.ko时设置dsp_max_node_num。
dsp_init_mode
DSP模块初始化模式。用户可以依据业务实际情况配置不同初始化模式,取值只有0或者1两个值,默认值为0。
初始化模式取值为0时,只要整个媒体系统退出都需要调用DSP相关的下电,关闭DSP接口才能退出系统,重新使用DSP时,需要按照正常流程上电,加载DSP镜像,使能DSP。
初始化模式取值为1时,整个媒体系统退出时,不需要执行DSP的关闭和下电接口,保持DSP镜像系统是运行状态。重新使用DSP时,不需要再次加载DSP镜像。
使用方法:
Linux系统通过加载xxxx_dsp.ko时设置dsp_init_mode。
API参考¶
DSP ARM端模块API接口操作。
提供以下API:
ss_mpi_svp_dsp_power_on:DSP上电。
ss_mpi_svp_dsp_power_off:DSP下电。
ss_mpi_svp_dsp_load_bin:加载DSP Bin。
ss_mpi_svp_dsp_enable_core:使能DSP核,使其工作。
ss_mpi_svp_dsp_disable_core:去使能DSP核,使其停止工作。
ss_mpi_svp_dsp_rpc:远程处理任务。
ss_mpi_svp_dsp_query:查询任务完成情况。
ss_mpi_svp_dsp_power_on¶
【描述】
DSP上电。
【语法】
td_s32 ss_mpi_svp_dsp_power_on(ot_svp_dsp_id dsp_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
在加载DSP镜像前,必须先调用ss_mpi_svp_dsp_power_on接口使DSP上电,否则加载镜像时会挂死。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_power_off¶
【描述】
DSP下电。
【语法】
td_s32 ss_mpi_svp_dsp_power_off(ot_svp_dsp_id dsp_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
无。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_load_bin¶
【描述】
加载DSP 镜像二进制文件。
【语法】
td_s32 ss_mpi_svp_dsp_load_bin(const td_char *bin_file_name, ot_svp_dsp_mem_type mem_type);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
用户要保证加载文件的完整性,否则可能出现DSP启动失败、系统挂死等问题。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_enable_core¶
【描述】
使能DSP核,使其工作。
【语法】
td_s32 ss_mpi_svp_dsp_enable_core(ot_svp_dsp_id dsp_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
无。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_disable_core¶
【描述】
去使能DSP核,使其停止工作。
【语法】
td_s32 ss_mpi_svp_dsp_disable_core(ot_svp_dsp_id dsp_id);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
无。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_rpc¶
【描述】
远程处理任务。
【语法】
td_s32 ss_mpi_svp_dsp_rpc(ot_svp_dsp_handle *handle, const ot_svp_dsp_msg *msg, ot_svp_dsp_id dsp_id, ot_svp_dsp_pri pri);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
无。
【举例】
无。
【相关主题】
无。
ss_mpi_svp_dsp_query¶
【描述】
查询任务完成情况。
【语法】
td_s32 ss_mpi_svp_dsp_query(ot_svp_dsp_id dsp_id, ot_svp_dsp_handle handle, td_bool *is_finish, td_bool is_block);
【参数】
【返回值】
失败,参见错误码。 |
【需求】
头文件:ot_common_svp.h、ot_common_dsp.h、ss_mpi_dsp.h
库文件:libss_dsp.a
【注意】
无。
【举例】
无。
【相关主题】
无。
数据类型和数据结构¶
DSP相关数据类型、数据结构定义如下:
ot_svp_dsp_handle:定义DSP句柄。
ot_svp_dsp_id:定义DSP ID。
ot_svp_dsp_pri:定义优先级。
ot_svp_dsp_mem_type:定义内存类型。
ot_svp_dsp_cmd:定义命令。
ot_svp_dsp_msg:定义消息格式。
ot_svp_dsp_handle¶
【说明】
定义DSP 句柄。
【定义】
typedef td_s32 ot_svp_dsp_handle;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_dsp_id¶
【说明】
定义DSP ID。
【定义】
typedef enum {
OT_SVP_DSP_ID_0 = 0x0,
OT_SVP_DSP_ID_1 = 0x1,
OT_SVP_DSP_ID_BUTT
} ot_svp_dsp_id;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_dsp_pri¶
【说明】
定义优先级。
【定义】
typedef enum {
OT_SVP_DSP_PRI_0 = 0x0,
OT_SVP_DSP_PRI_1 = 0x1,
OT_SVP_DSP_PRI_2 = 0x2,
OT_SVP_DSP_PRI_BUTT
} ot_svp_dsp_pri;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_dsp_mem_type¶
【说明】
定义内存类型。
【定义】
typedef enum {
OT_SVP_DSP_MEM_TYPE_SYS_DDR_DSP_0 = 0x0,
OT_SVP_DSP_MEM_TYPE_IRAM_DSP_0 = 0x1,
OT_SVP_DSP_MEM_TYPE_DRAM_0_DSP_0 = 0x2,
OT_SVP_DSP_MEM_TYPE_DRAM_1_DSP_0 = 0x3,
OT_SVP_DSP_MEM_TYPE_SYS_DDR_DSP_1 = 0x4,
OT_SVP_DSP_MEM_TYPE_IRAM_DSP_1 = 0x5,
OT_SVP_DSP_MEM_TYPE_DRAM_0_DSP_1 = 0x6,
OT_SVP_DSP_MEM_TYPE_DRAM_1_DSP_1 = 0x7,
OT_SVP_DSP_MEM_TYPE_BUTT
} ot_svp_dsp_mem_type;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
ot_svp_dsp_cmd¶
【说明】
定义命令。
【定义】
typedef enum {
OT_SVP_DSP_CMD_INIT = 0x0,
OT_SVP_DSP_CMD_EXIT = 0x1,
OT_SVP_DSP_CMD_DILATE_3X3 = 0x2,
OT_SVP_DSP_CMD_ERODE_3X3 = 0x3,
OT_SVP_DSP_CMD_BUTT
} ot_svp_dsp_cmd;
【成员】
【注意事项】
用户增加的命令必须OT_SVP_DSP_CMD_BUTT + 1以后,不能与已有重合。
【相关数据类型及接口】
无。
ot_svp_dsp_msg¶
【说明】
定义消息格式。
【定义】
typedef struct {
td_u32 cmd; /* CMD ID, user-defined SVP_DSP_CMD_BUTT + */
td_u32 msg_id; /* Message ID */
td_u64 body; /* Message body */
td_u32 body_len; /* Length of pBody */
} ot_svp_dsp_msg;
【成员】
【注意事项】
无。
【相关数据类型及接口】
无。
错误码¶
DSP模块API错误码如下所示。
表 1 DSP模块API错误码
Proc调试信息¶
概述¶
调试信息采用了Linux下的proc文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用。
【文件目录】
/proc/umap
【信息查看方法】
在控制台上可以使用cat命令查看信息,cat /proc/umap/dsp;也可以使用其他常用的文件操作命令,例如 cp /proc/umap/dsp ./,将文件拷贝到当前目录。
在应用程序中可以将上述文件当作普通只读文件进行读操作,例如fopen、fread等。
取值为{0, 1}的参数,如未列出具体取值和含义的对应关系,则参数为1时表示肯定,为0时表示否定。
取值为{aaa, bbb, ccc}的参数,未列出具体取值和含义的对应关系,但可直接根据取值aaa、bbb或ccc判断参数含义
Proc信息说明¶
【调试信息】
~ # cat /proc/umap/dsp
[DSP] Version: [Vx.x.x.x B0xx Release], Build Time[mm dd yyyy, hh:mm:ss]
----------------------------------------module param-------------------------------------------------------------------
max_node_num dsp_init_mode
30 0
----------------------------------------dsp config attr-----------------------------------------------------------------
core_id sram_addr
0 40210000
1 42000000
----------------------------------------dsp core status-----------------------------------------------------------------
core_id enable
0 yes
1 no
----------------------------------------dsp pri status------------------------------------------------------------------
core_id pri create
0 0 yes
0 1 no
0 2 no
1 0 no
1 1 no
1 2 no
----------------------------------------dsp task info-------------------------------------------------------------------
core_id pri hnd task_fsh hnd_wrap free_num work_num
0 0 298 298 0 30 0
0 1 0 0 0 30 0
0 2 0 0 0 30 0
1 0 0 0 0 30 0
1 1 0 0 0 30 0
1 2 0 0 0 30 0
----------------------------------------dsp runtime info----------------------------------------------------------------
core_id pri cnt_per_sec max_cnt_per_sec total_int_cnt_last_sec total_int_cnt qt_cnt cost_tm m_cost_tm cost_tm_per_sec m_cost_tm_per_sec total_int_cost_tm
0 0 31 32 281 298 0 5 7 159 166 1554
0 1 0 0 0 0 0 0 0 0 0 0
0 2 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0
1 1 0 0 0 0 0 0 0 0 0 0
1 2 0 0 0 0 0 0 0 0 0 0
run_tm
35
35
35
35
35
35
----------------------------------------dsp invoke info-----------------------------------------------------------------
core_id pri rpc
0 0 298
0 1 0
0 2 0
1 0 0
1 1 0
1 2 0
【调试信息分析】
记录当前DSP工作状态资源信息,主要包括DSP 队列状态信息,任务状态信息,运行时状态信息和调用信息。
【参数说明】
【注意】
无